





























Computec
CDD5.0
EN
CDD 5.0: user manual – Rev.01
Page 34/63
5.1.4
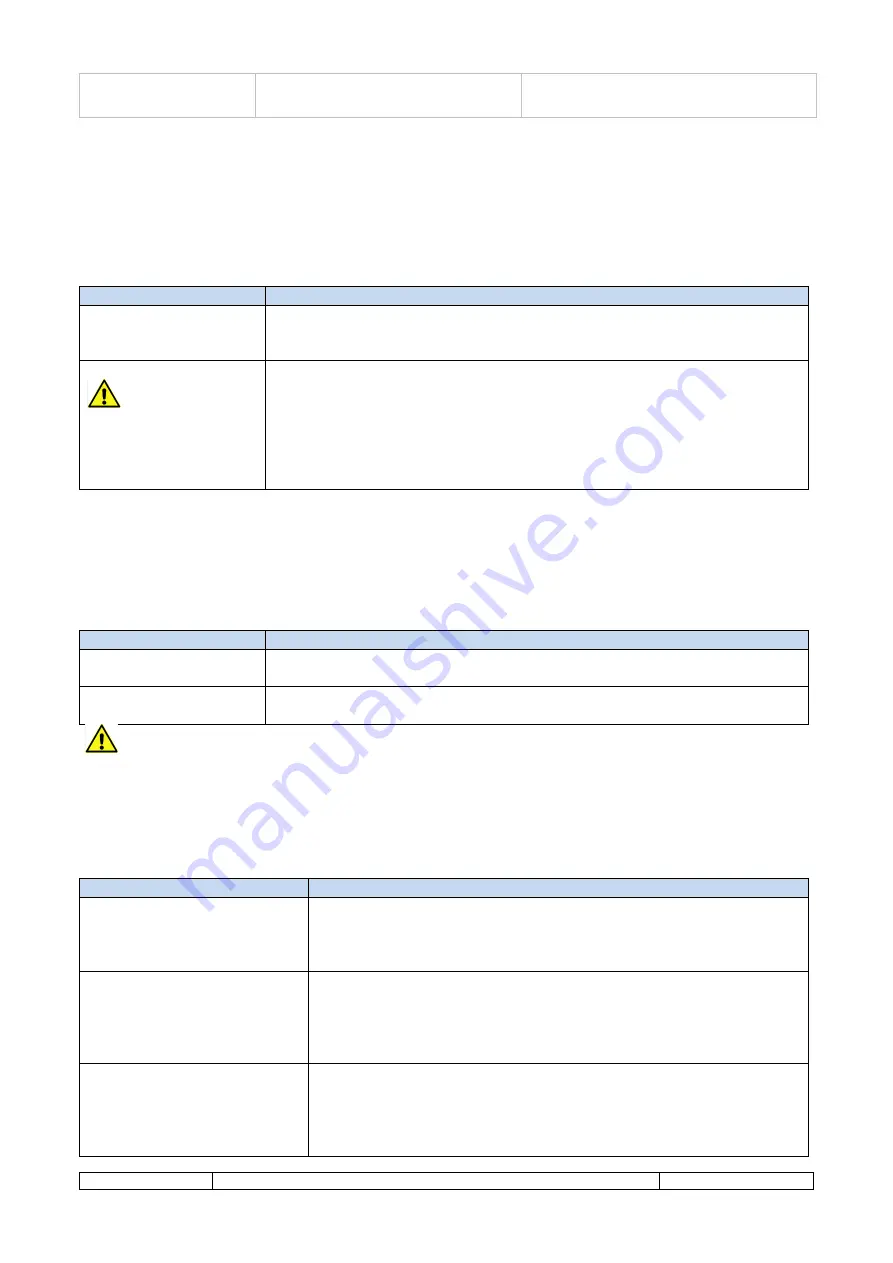
PC05: car door locking device settings
This parameter allows to configure the system to manage the unlocking operation when the car door
locking device is installed, as reported in the table below. The main function executed by the door
controller in case the car door locking device is present is the unlocking movement when main power is off,
to permit the evacuation from the car to the floor.
Parameter value
Notes
00 = not present
(default value)
The car door locking device is not present: in case of black-out, when door is closed,
the controller keeps the skate closed, with the residual energy stored inside the
controller.
01 = present
The car door locking device is present: in case of black-out, when door is closed, the
controller tries immediately to open the skate and the panels for at least 20mm, with
the residual energy stored inside the controller.
If the cabin is inside the unlocking zone, this movement permits the unlocking of the
hook, and the consequent possibility to open manually the car and landing door.
If the car is outside the unlocking zone, this movement is not permitted by the hook,
and the car door remains blocked, because the evacuation is not possible.
5.1.5
PC06: glass door settings
This parameter allows to configure the installed door type, if with or without glass panels, to activate if
necessary the functions related to the glass panels, according to the standards limits.
Parameter value
Notes
00 = door panels not glazed
(default value)
All the door panels of the lift haven’t glass panels
01 = glazed door panels
At least one of the door panels of the lift has glass
: refer to paragraph 8.6 for the verification of the standards limits.
5.1.6
PC99: MLC interface logic settings
This parameter permits to configure the MLC commands (DOC, DCC, RSC) management on the door drive,
even from the input logic side, that on from the function of the RSC, as reported in the following table:
Parameter value
Notes
00 = DOC DCC RSC active high and
RSC function is forced closing at
reduced speed signal
(default value)
The DOC DCC RSC are high active ( the MLC closes the signals to the used
24Vdc). The RSC signal is a forced closing signal. The activation of the RSC from
the MLC means the high priority closing with reduced speed, even if DOC signal
is active.
01 = DOC DCC RSC active low, RSC
function is reduced speed
movement enable signal
The DOC DCC RSC commands are low active (the MLC closes the signals to the
used 0V). The RSC command is the enable signal for the reduced speed
movement. The activation of the RSC itself does not start any movement, but:
DOC + RSC = opening with reduced speed
DCC + RSC = closing with reduced speed
02 = DOC DCC RSC active high, RSC
function is reduced speed
movement enable signal
The DOC DCC RSC commands are high active (the MLC closes the signals to the
used 24Vdc). The RSC command is the enable signal for the reduced speed
movement. The activation of the RSC itself does not start any movement, but:
DOC + RSC = opening with reduced speed
DCC + RSC = closing with reduced speed