





























ComNav G2 & G2B Installation & Operation
Document PN 29010093 V1.5
- 55 -
16 December 2016
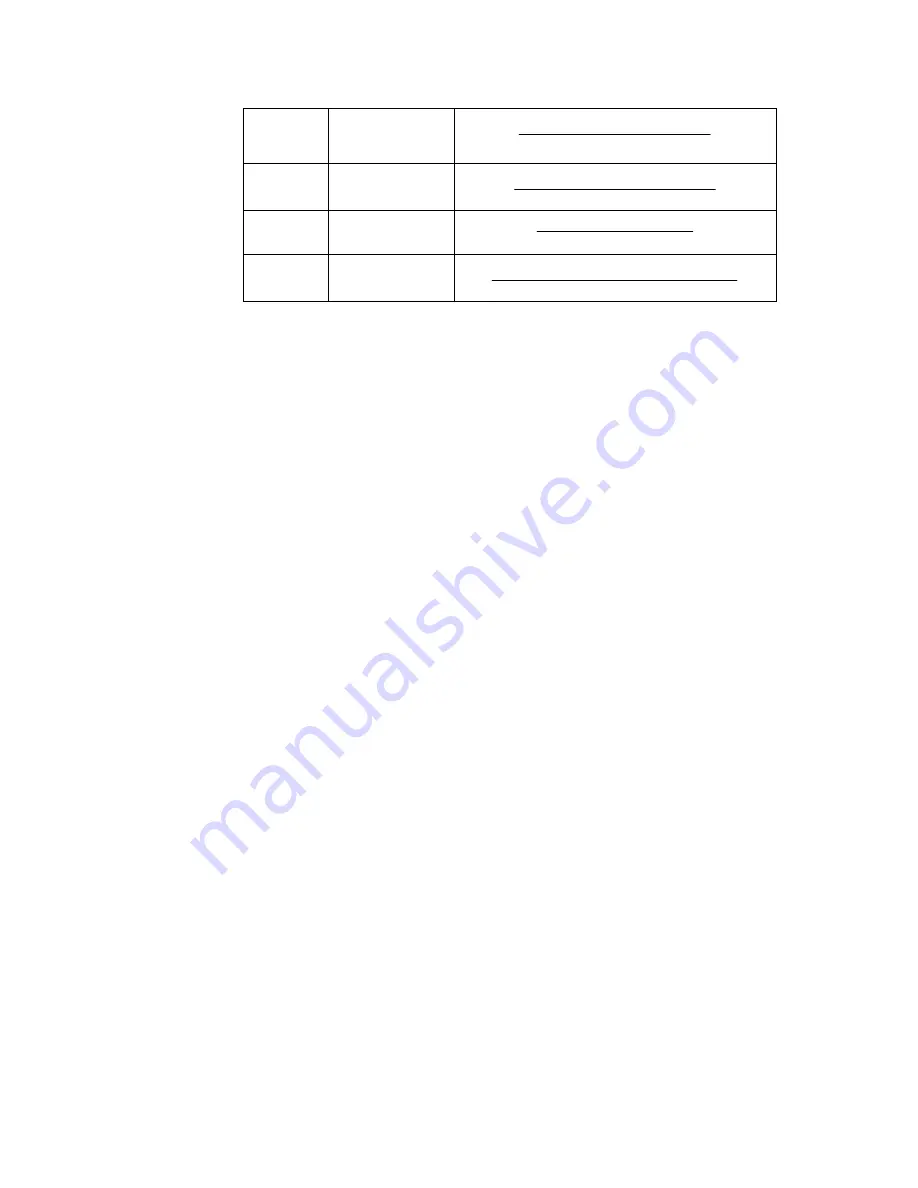
HTAU
0.02 to 60.0
•
default: 2.0
sec)
/
(in
turn
of
rate
max
20
°
HRTAU
0.02 to 60 sec
•
default: 2.0
10
)
sec
/
(in
turn
of
rate
of
rate
max
2
°
PTAU
0.02 to 60 sec
•
default: 0.5
sec)
/
(in
pitch
of
rate
max
10
°
SPDTAU
○
2
0.02 to 60 sec
•
default: 4.0
10
)
sec
/
metres
(in
on
accelerati
of
rate
max
2
Table 12 – Time Constant Formulae
1
Speed conversions: 1 Knot = 0.51444 metres/sec & 1 Km/H = 0.53996 Knots
○
2
For Radar application, it is suggested to change SPDTAU to 1.0 or lower
CAUTION!
COG is computed using the Primary GPS receiver only, and
its accuracy is dependant upon the speed of the vessel (noise in the COG
measurement is inversely proportional to speed).
When the vessel is stationary, the value of COG is invalid!!
DGPS Source
The factory-default DGPS correction source in the G2 is SBAS. You can turn off differential
correction by using $PCMNDIFF, 0.
Baud Rates & Data Bandwidth
If you are going to change the enabled sentences and/or update rates that the G2 is
outputting (on one or both ports), you may need to change the Baud rate, with the
PCMNBAUD command.
The factory-default Baud rate for all ports in the G2 is 4800 Baud; this complies with the
NMEA 0183 Standard. The G2’s serial data is always formatted 8-N-1, which means that
there are 10 bits sent per byte, and so the factory-default transmit/receive data bandwidth is
480 bytes/second, on each port.
In any serial communications system, the total number of bytes sent per second must not
exceed the data bandwidth. A good rule of thumb when setting up serial communications
systems is that the total bytes/sec should be less than ~90% of the bandwidth:
•
The NMEA & proprietary sentences enabled in the factory defaults fit within the data
bandwidth of the factory-default 4800 Baud: 417.4 bytes/sec on Port 1, 2, and 445
bytes/sec on Port 3.
If the Baud rate is too low – i.e., bandwidth less than the total bytes/sec that the G2 is
configured to transmit – the data will be corrupted, in random & unpredictable ways. The
result will typically be “Invalid Data” errors on the equipment that is connected to the G2.
Summary of Contents for Vector G2
Page 2: ......
Page 6: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 4 16 December 2016...
Page 12: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 10 16 December 2016...
Page 14: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 12 16 December 2016...
Page 19: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 17 16 December 2016...
Page 43: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 41 16 December 2016 Operation...
Page 44: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 42 16 December 2016...
Page 59: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 57 16 December 2016...
Page 83: ...ComNav G3 G3B Installation Operation Document PN 29010093 V1 5 81 16 December 2016...
Page 84: ...ComNav G3 G3B Installation Operation Document PN 29010093 V1 5 82 16 December 2016 Index...
Page 85: ...ComNav G3 G3B Installation Operation Document PN 29010093 V1 5 83 16 December 2016...
Page 87: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 85 16 December 2016...
Page 88: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 86 16 December 2016 User Notes...
Page 89: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 87 16 December 2016...






















































