





























GB
// 66
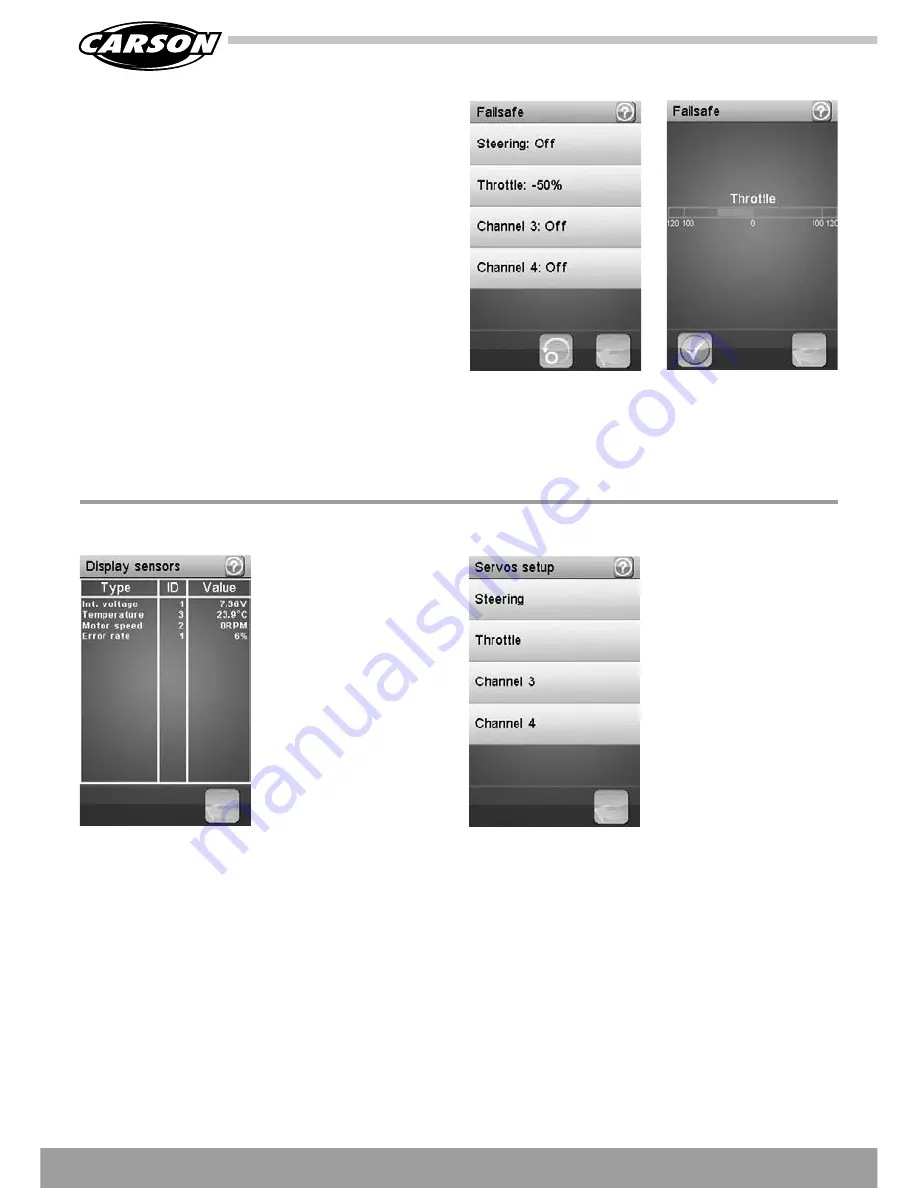
• Fallsafe: In case of a loss of signal, the receiver can be
configured to set one or several servos to a predefined position.
The first menu displays the current setting of the 4 channels. „Off“
means that in case of a loss of signal, the corresponding servo will
keep its last received position.
Touch a channel to set its failsafe behavior. If activated, set the
channel to the desired position using the corresponding steering
wheel, throttle trigger, trim or push button then while maintaining
that position, touch the back button. The position of the servo is
then memorized.
ln this example, only the throttle
is set to half brake in case of a
loss of signal. The other 3 servos
will keep their previous position.
In this example, the failsafe
on the channel 2 (throttle) is
activated and set to half brake
the vehicle.
Display sensors:
display the type, ID and value
of all connected sensors.
Receiver can connect 15
sensors at most.
Servos setup:
If servos are connected on the
external serial interface, this
function attributes a channel
to each servo. Choose the
channel to attribute.
Setting the i-bus:
1. Connect the i-bus-
module with the receiver
and servos.
2. Select [control], [gas],
[channel 3] or [channel 4].
- the system displays an
input prompt
- press the correct servo-interface button or select “cancel”.
3. Press the channel button on the i-bus to assign the servo to the
channel selected on the transmitter