





















32
7.2.6 IR Compensation (IR)
- The IR comp
circuit is used to stabilize motor speed
under varying loads. (See Figure 27).
Note: If control is in Tach Feedback mode,
the IR trimpot should be set to minimum
-
ccw.
Readjust the IR trimpot as follows:
Run the motor at approximately 30-50% of
rated speed under no load and measure
actual speed. Load the motor to rated
current. Rotate IR trim pot so that the loaded
speed is the same as the unloaded speed measured in step, 7.2.1. Control is now
compensated so that minimal speed change will occur over a wide range of motor load.
Note: Too much IR Comp will cause unstable (oscillatory) operation.
7.2.7 Timed Current Limit (TCL)
- Jumper
J5 must be in the "TCL" position, in
order for Timed Current Limit to be
operational. This trimpot determines
the approximate amount of time the
drive will stay in Current Limit before
trip out. The trimpot has an
adjustment range of .5 - 15 seconds
and is factory set for seven (7)
seconds. The trimpot can be reset
according to the desired trip time.
Rotating the trimpot clockwise
increases the trip time. (See Figure 28). This function provides motor overload
protection. See Section 6.5, and Application Note," for TCL, operation on page 28.
7.2.8 Jog Speed (JOG) -
This trimpot is
operational only when the optional
RUN-STOP-JOG Switch (BC 157) is
installed. In the JOG position the JOG
trimpot can be adjusted to the JOG
speed. See Figure 29.
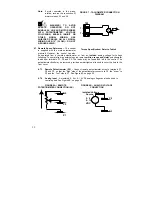
FIGURE 27 - IR COMPENSATION
TRIMPOT RANGE
4, 8 VDC
Factory Set to 4/8 Volts DC for
Controls with 90/180 Volt
DC Output.
FIGURE 28 - TIMED CURRENT LIMIT
TRIMPOT RANGE
0
7 SEC.
(Factory Set to 7 Seconds)
FIGURE 29 - JOG SPEED TRIMPOT
RANGE
Summary of Contents for NEMA-4X
Page 37: ...37 Notes...
Page 38: ...38 Notes...