























Page 31
IronHorse GSDA-DP-D DC Drives Accessory User Manual – 1st Ed. Rev. A – 11/11/2019
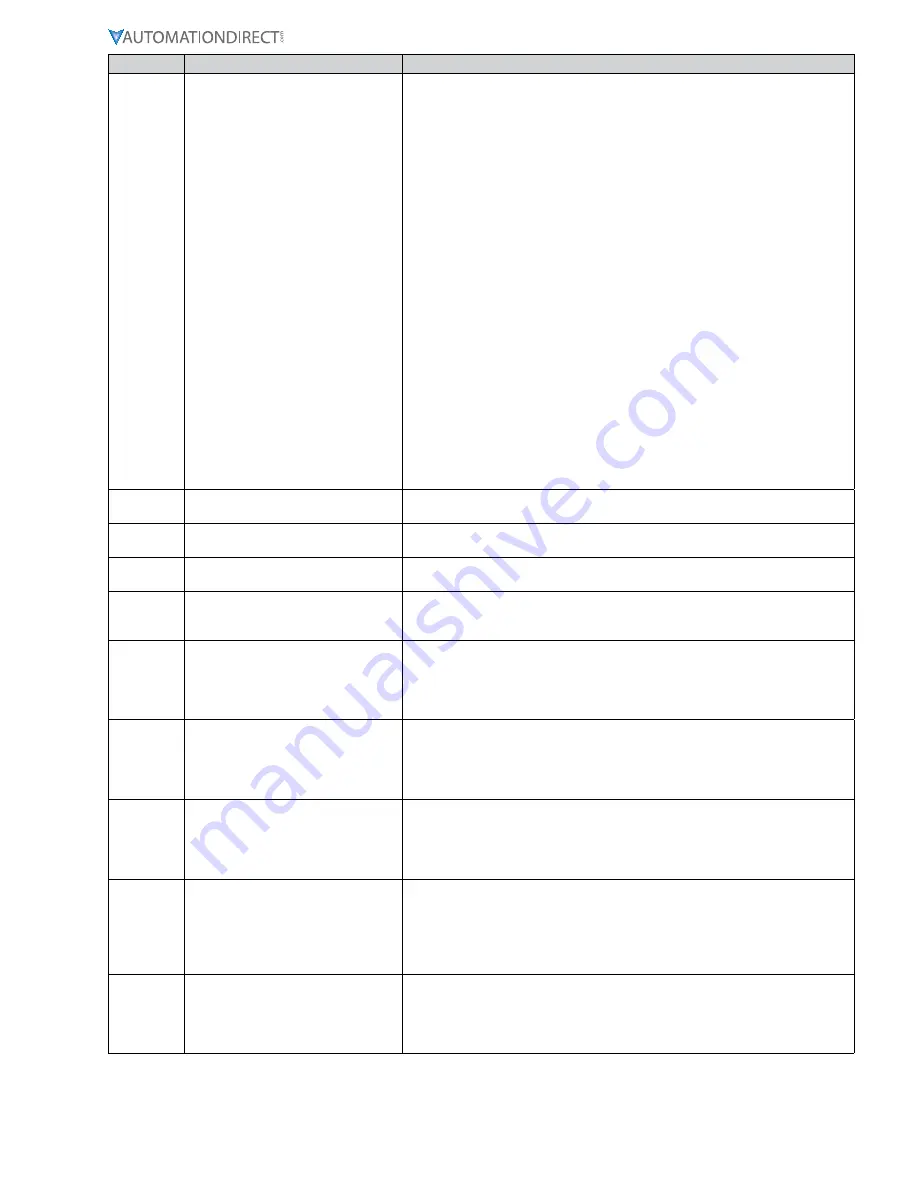
Parameter
Parameter Name
Description
54
Alarm 1 Reset Configuration
This setting determines which actions will cause an active alarm to be silenced
or reset.
• Mode 1: No Silencing, Reset On ENTER Button Press
In this mode, an active alarm cannot be silenced. Once the alarm condition
ceases to exist, however, the ENTER button may be pressed to cause a
manual reset.
• Mode 2: No Silencing, Reset On S2 Input High (Not Wired To Common)
Similar to Mode 1. Once the alarm condition ceases to exist, setting the S2
input to a high (+5V) state or allowing it to float disconnected will cause a
manual reset.
• Mode 3: No Silencing, Reset On S2 Input Low (Wired To Common)
Similar to Mode 1. Once the alarm condition ceases to exist, setting the
S2 input to a low (COM) state or wiring it to common will cause a manual
reset.
• Mode 4: Silencing Enabled, Reset On ENTER Button Press
When the conditions for an active alarm persist, pressing any user-interface
button will result in the alarm being silenced or deactivated, but not reset. A
second attempt to reset the alarm must be made after the condition ceases
to exist to clear the alarm.
• Mode 5: Silencing Enabled, Reset On S2 Input High (Not Wired To Common)
Similar to Mode 4. Setting the S2 input to a high (+5V) state or allowing it
to float disconnected will cause the alarm to be silenced or reset depending
on the current state of the alarm conditions.
• Mode 6: Silencing Enabled, Reset On S2 Input Low (Wired To Common
Similar to Mode 4. Setting the S2 input to a low (COM) state or wiring it
to common will cause the alarm to be silenced or reset depending on the
current state of the alarm conditions.
55
Alarm 1 Annunciator Flash On Alarm When set to 1, this will cause the “Alm1” LED Annunciator to flash when an
alarm 1 condition is active. A setting of zero defeats this function.
56
Alarm 1 Pulse “ON” Time
This Parameter defines the number of seconds the output should be enabled
during the ‘on’ phase of an active pulsing alarm’s output.
57
Alarm 1 Pulse “OFF” Time
This Parameter defines the number of seconds the output should be disabled
during the ‘off’ phase of an active pulsing alarm’s output.
58
Alarm 1 Pulse Count
This setting determines how many pulses are outputted when the alarm is
activated and is configured in the pulse output style. When 0 is entered, the
unit will be set for continuous pulses while the alarm is active.
59
Alarm 1 Lower Limit
This setting defines either the lower limit or the lower end of a range for
the alarm region. Alarm limits are set in engineering units without regard to
decimal point or colon position. In Rate and Follower Modes, a limit of 123
could represent a display value of 123, 12.3, 1.23, or 0.123. When in Time
Mode, a limit of 123 would represent 1:23 on the display.
60
Alarm 1 Upper Limit
This setting defines either the upper limit or the upper end of a range for
the alarm region. Alarm limits are set in engineering units without regard to
decimal point or colon position. In Rate and Follower Modes, a limit of 123
could represent a display value of 123, 12.3, 1.23, or 0.123. When in Time
Mode, a limit of 123 would represent 1:23 on the display.
65
Alarm 1 Logical “OR” Activation
Conditions (Flags Table 2)
This Parameter, in conjunction with Parameters 66 & 67, defines which
conditions will result in the Alarm 1 output being activated. The function is that
of a Logical “OR”ing of the selected Drive Condition Flags Table 2. A setting of
zero defeats this “OR” function entirely. Please see the sections “Setting and
Reading Softswitches” and “Setting Alarm Conditions” for further details.
66
Alarm 1 Logical Activation Condition
Inverters (Flags Table 2)
This Parameter, in conjunction with Parameters 65 & 67, defines which
conditions will result in the Alarm 1 output being activated. The function
allows selected Drive Condition Flags Table 2 to be “inverted” before being
presented to the “inputs” of the “AND” function (see Parameter 67). Please
see the sections “Setting and Reading Softswitches” and “Setting Alarm
Conditions” for further details.
67
Alarm 1 Logical “AND” Activation
Conditions (Flags Table 2)
This Parameter, in conjunction with Parameters 65 & 66, defines which
conditions will result in the Alarm 1 output being activated. The function is that
of a Logical “AND”ing of the selected Drive Condition Flags Table 2. A setting
of zero defeats this “AND” function entirely. Please see the sections “Setting
and Reading Softswitches” and “Setting Alarm Conditions” for further details.







































































