




























Page 26
IronHorse GSDA-DP-D DC Drives Accessory User Manual – 1st Ed. Rev. A – 11/11/2019
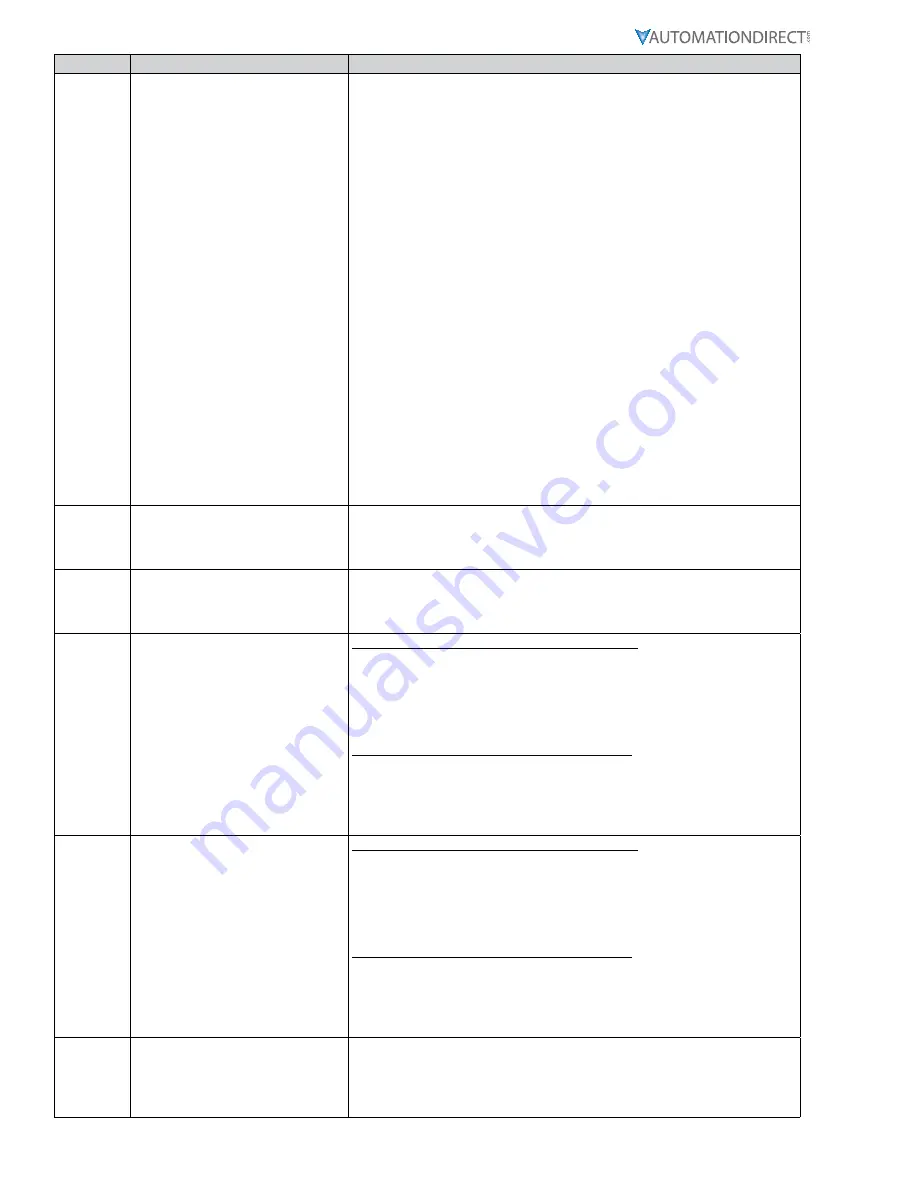
Parameter
Parameter Name
Description
22
Motor Control Method
This Parameter controls two behaviors in the GSDA-DP-D, Low-Speed “Gain-
Tracking”, and Ultra-Low-Speed Control Mode (“gearbox” mode). When set to
a value of 1 (or 3), this parameter automatically (and proportionally) reduces
the “gain” of the PID values when the Target Speed (in RPMs) is less than
200. This greatly increases the overall stability at low speeds in applications
that require a very wide range of Target Speeds, without having to unduly
compromise control responsiveness at higher speeds. When set to a value of 2
(or 3), this Parameter adjusts the speed-control characteristics of the GSDA-
DP-D to enhance the smoothness of speed control when in a situation where
the “tach pickup” must be installed on the “low speed side” of a very slowly
turning gear-motor output shaft. A rule of thumb would probably be that you
may consider enabling this Mode if that shaft is turning less than 10 RPM,
and the pickup produces less than 10 Pulses Per Revolution (PPR). Use this
Mode only if speed stability can not be achieved by adjusting the PID settings
(Parameters 26 – 28).
• Mode 0: Disabled
Both Low-Speed-Gain-Tracking and Ultra-Low-Speed Control Mode are
Defeated.
• Mode 1: Low-Speed-Gain-Tracking (Only) Enabled
Low-Speed-Gain-Tracking is Enabled, Ultra-Low-Speed Control Mode is
Defeated.
• Mode 2: Ultra-Low-Speed Control Mode (Only) Enabled
Low-Speed-Gain-Tracking is Defeated, Ultra-Low-Speed Control Mode is
Enabled.
• Mode 3: Low-Speed-Gain-Tracking and Ultra-Low-Speed Control Mode
(Both) Enabled
Both Low-Speed-Gain-Tracking and Ultra-Low-Speed Control Mode are
Enabled.
23
Acceleration Setting
This Parameter determines how fast the GSDA-DP-D will accelerate toward the
displayed target setting. This Parameter is set in engineering units of change
per second, such as RPM, GPM, or feet per second. In Follower Mode, this
Parameter is set in RPM units.
24
Deceleration Setting
This Parameter determines how fast the GSDA-DP-D will decelerate toward the
displayed target setting. This Parameter is set in engineering units of change
per second, such as RPM, GPM, or feet per second. In Follower Mode, this
Parameter is set in RPM units.
26
Closed-Loop Proportional (P) Gain
/ Open-Loop Output Percentage
Maximum
Closed-Loop Operation (Item 22 set to a value < 32)
In Closed-Loop operation, the Proportional Gain is the first of three Items
which define the responsiveness of the control with respect to how fast it
responds to changing loads. Because the Accu-Set plus controls are true
velocity-form PID control, the higher the P Gain, the more aggressively the unit
will respond to a change in load or target speed. See the “Basic Operating
Instructions” section of the manual for more details.
Open-Loop Operation (Item 22 set to a value = 32)
In Open-Loop operation, this Item sets the percentage (from 0% to 100.0%) of
the voltage supplied across the LO (P1-5) and HI (P1-3) terminals that will be
Output across the LO (P1-5) and WP (P1-4) terminals when the Target “Speed”
setting is equal to (or less than) the Display Minimum (Item 20). See the “Basic
Operating Instructions” section of the manual for more details.
27
Closed-Loop Integral (I) Gain /
Open-Loop Output Percentage
maximum
Closed-Loop Operation (Item 22 set to a value < 32)
The Integral Gain is the second of two Items which define the responsiveness
of the control with respect to how fast it responds to changing loads. The
higher the I Gain, the more aggressively the unit will drive the load. However,
it will sometimes be necessary to decrease the I Gain and/or increase the P
Gain to prevent unwanted oscillation and instabilities. See the “Basic Operating
Instructions” section of the manual for more details.
Open-Loop Operation (Item 22 set to a value = 32)
In Open-Loop operation, this Item sets the percentage (from 0% to 100.0%) of
the voltage supplied across the LO (P1-5) and HI (P1-3) terminals that will be
Output across the LO (P1-5) and WP (P1-4) terminals when the Target “Speed”
setting is equal to (or greater than) the Display Maximum (Item 21). See the
“Basic Operating Instructions” section of the manual for more details.
28
Derivative (D) Gain
(Unused in Open-Loop operation)
The Derivative Gain is the third of the three Parameters which define the
responsiveness of the control with respect to how fast it responds to changing
loads. Although most applications will run fine with the D Gain set to zero,
sometimes adding a little “D” will help minimize overshoot and undershoot.
See the “Basic Operating Instructions” section of the manual for more details.







































































