





























ARKEL Elektrik Elektronik Ltd.
Ş
ti. www.arkel.com.tr
08.2012
ADrive
60
3-CONTROLLER SETUP
3.1 – PI speed controller KP0 gain
3.2 – PI speed controller KI0 gain
3.3 – PI speed controller KP1 gain
3.4 – PI speed controller KI1 gain
3.5 – Anti-Rollback position controller
3.6 – Anti-Rollback position controller Kp gain
3.7 – Anti-Rollback position controller Kd gain
3.9 – Encoder filter
3.10 – Dynamic filter
3.1-3.4 The speed controller Kp and Ki gains
(KP0, KI0, KP1, KI1)
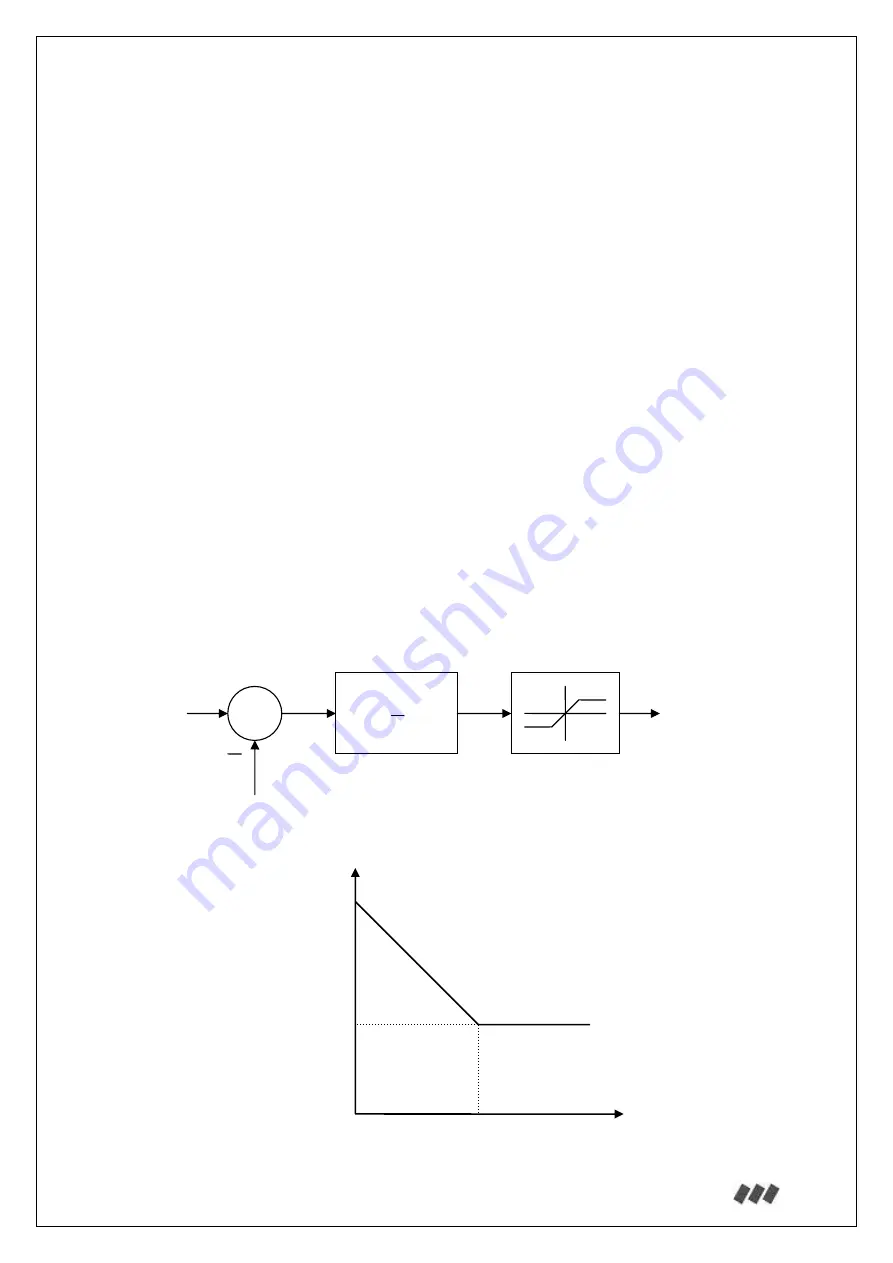
PI speed controller integral and proportional factor is adjusted automatically in accordance with travel
speed. At zero speed PI speed controller process with KI0 integral factor and it is increased to KI1 at full
speed step by step.
At start-up of elevator, KI0 and KP0 is hold high to make the PI speed controller’s reaction faster to
very little speed changes. At full speed there is no need for so much sensitive PI controller because it
causes high motor enforce. (For example at start-up the reaction must be quick to 5-10 revolution
changes, while at 1400 rpm it is meaningless to give sudden torque changes for 5-10 revolutions.)
The integral factor multiplies the total of errors so must be adjusted to very smaller than KP otherwise
it causes vibration and overshoots at travel curve. Usually it is better to adjust KP higher than 10xKI.
If KI and KP are too high it makes noise at motor. Too low values cause delays to catch the reference
speed and sensitivity loss.
KP,KI
Fout
KP0,KI0
KP1,KI1
Fnom
KI
S
KP
*
1
Speed
Reference
Encoder feedback
signal
Limiter
Output
torque
reference
Σ
+