





























Control Wiring
ANCA Motion
D-000129 Rev 09
83
6
6.4
Ethernet Interface
EtherCAT
®1
6.4.1
AMD5x
supports the EtherCAT protocol with ‘Servo Profile over EtherCAT’ (SoE). This protocol provides
deterministic communication over a standard 100Mbit/s (100Base-TX) Fast Ethernet (IEEE802.3) connection.
This makes it suitable for the transmission of control and feedback signals between the AMD5x and other
EtherCAT enabled controllers.
AMD5x functions as an EtherCAT slave controller, providing two ports (IN/OUT) for connection to other EtherCAT
compliant equipment. This allows nodes to be connected in many configurations such as a ring, star, or tree, with
EtherCAT’s self-terminating technology automatically detecting breaks or an intended end of line.
If only one port is used for EtherCAT operation, it must be the X1 (IN) port.
EtherCAT Topology / Port Assignment
6.4.2
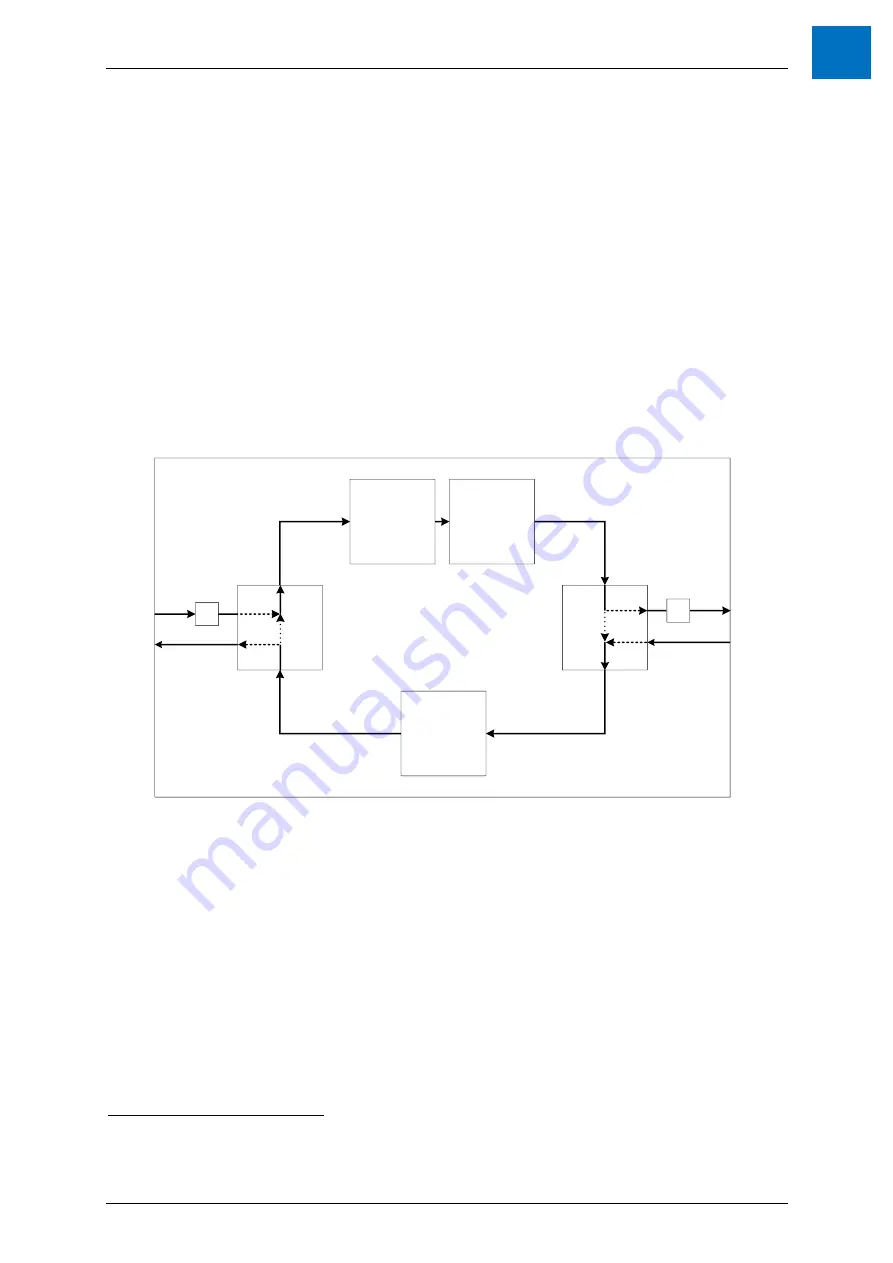
Each AMD5x PIU and Drive utilises the EtherCAT system topology as shown in
Loopback
Function
EtherCAT
Processing Unit
EtherCAT
Slave Controller
Port 0
Closed
Port 0 open
or all ports
closed
Auto-
forwarder
Loopback
Function
Loopback
Function
Port 1
Closed
Auto-
forwarder
Loopback
Function
In
Out
Port 3
Closed
Port 2
Closed
Port 1
Open
Figure 6-1: EtherCAT system topology
1
EtherCAT
®
is a registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany
Summary of Contents for AMD5x Series
Page 12: ......





















































