





























3.3. Motor and Feedback Specifications
IMPORTANT
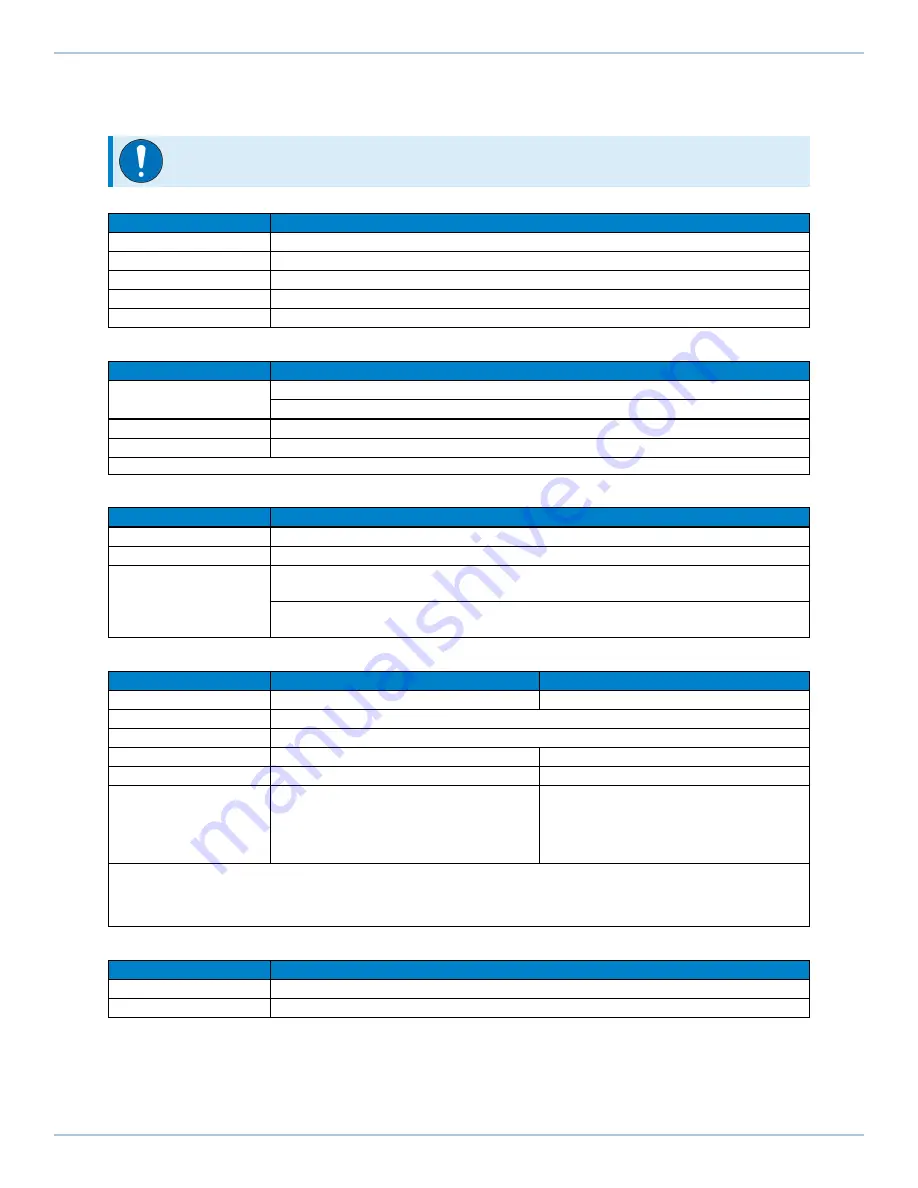
: All 5 V supplies share one common connection within the stage.
Table 3-11:
Hall-Effect Sensor Specifications
Specification
Supply Voltage
5 V ±5%
Supply Current
50 mA
Output Type
Open Collector
Output Voltage
24 V max (pull up)
Output Current
5 mA (sinking)
Table 3-12:
Thermistor Specifications (BMS Motor Options)
Specification
Polarity
Logic "0" (no fault)
Logic "1" (over-temperature fault)
Cold Resistance
∼
100 Ω
Hot Resistance
∼
10 K
Note:
1K pull-up to +5V recommended.
Table 3-13:
Encoder Specifications
Specification
Supply Voltage
5 V ±5%
Supply Current
250 mA (typical)
Output Signals
(Differential)
Sinusoidal Type (Incremental Encoder)
: Analog: SIN+, SIN-, COS+, COS-, 1V
pk-pk
;
Digital (RS422): MRK+, MRK- signals.
Digital Output (Incremental Encoder)
: TTL Encoder line-driver signals; RS422/485
compatible
Table 3-14:
Limit Switch Specifications
-LI1 Option
-LI2 Option
Supply Voltage
5 V
5 V
Supply Current
25 mA
Output Type
Open Collector
Output Voltage
5 V
5 V
Output Current
10 mA (sinking)
10 mA (sinking)
Output Polarity
(2)
(Factory Configured)
Normally Closed (NC)
l
Not In Limit: Sinks current to ground
(Logic "0")
l
In Limit: High impedance (Logic "1")
Normally Open (NO)
l
Not In Limit: High impedance (Logic
"1")
l
In Limit: Sinks current to ground
(Logic "0")
Notes:
1. If you drive the ECO165SL beyond the electrical limit, it will encounter a mechanical stop. An impact against the
mechanical stop could cause damage to the stage.
2. -LI1 and -LI2 must have an external pull-up to +5 V (10 kΩ recommended).
Table 3-15:
Brake Specifications
Specification
Supply Voltage
24 VDC
Supply Current (typical)
250 mA (current required to release the brake and allow motion)
3.3. Motor and Feedback Specifications
ECO165SL Hardware Manual
36
www.aerotech.com







































































