





























CM
/
C
OMMISSIONING
M
ANUAL
21
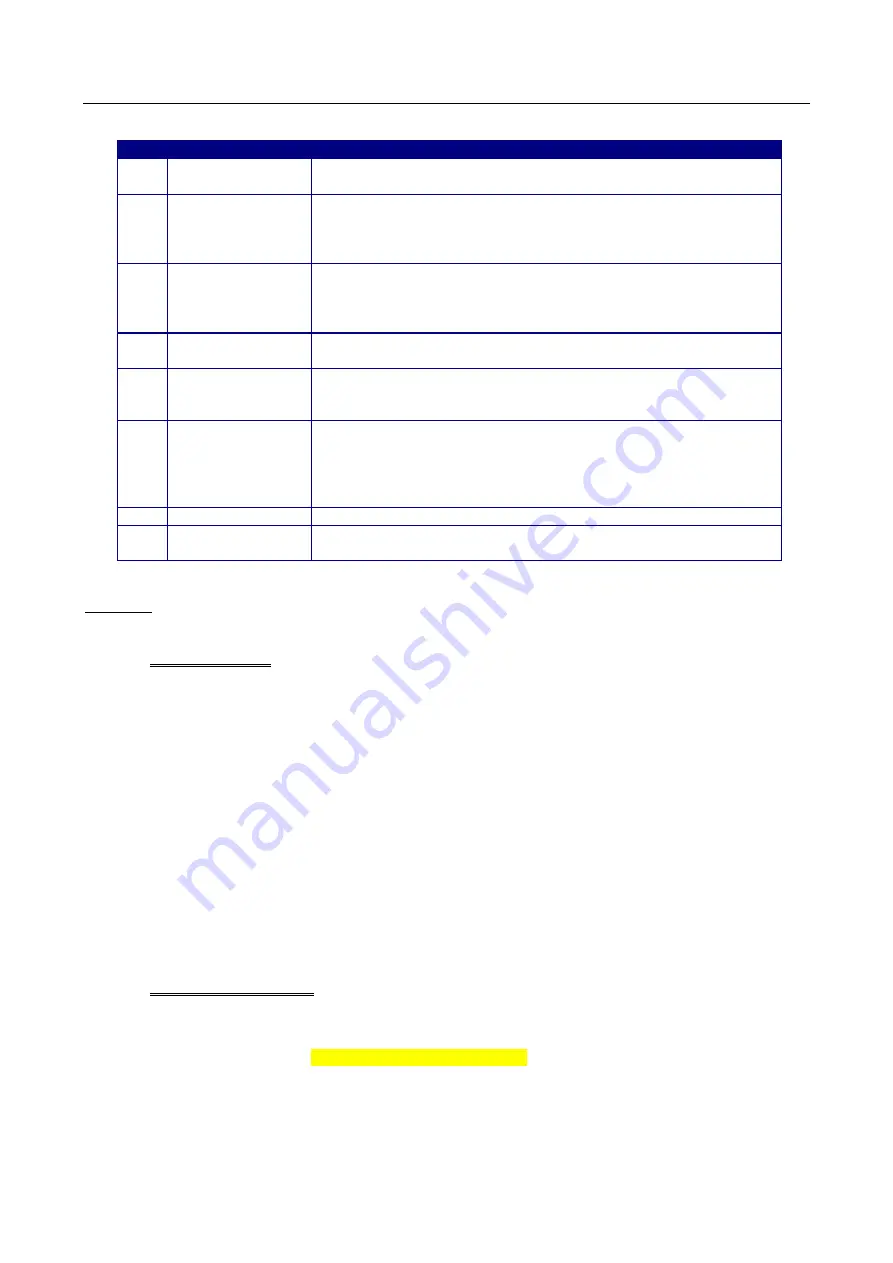
Value Name
Description
23
ETM
Customer-specific special version with actual value acquisition
through pulse duration measurement
24
ANA_SIGN_SSI
Axis with analog manipulated variable output and actual value
acquisition through SSI absolute encoder. The analog output signal is
always positive; the directional information is output through the
digital output.
25
ANA_SIGN
ENDAT2_2
Axis with analog manipulated variable output and actual value
acquisition through ENDAT 2.2 absolute encoder. The analog output
signal is always positive; the directional information is output through
the digital output.
26
SSI_PULSE
Servo axis with pulse direction interface and SSI absolute encoder
actual value acquisition (controlled stepper motor)
27
ENDAT22_PULSE
Servo axis with pulse direction interface and ENDAT 2.2 absolute
encoder actual value acquisition (controlled stepper motor)
In preparation!
28
INC_PULSE_NDX
Servo axis with pulse direction interface and incremental encoder
actual value acquisition (controlled stepper motor)
Contrary to motor type 12, with this type of axis, the stepper motor
direction signal is output at a digital output (24 V). The NDX/Sign pins
are inputs here and can be used for the analysis of an index trace.
29
NDX_DIAG
Special version for diagnostic purposes
30
ENDAT_SNIFFER
Passive retrieval at an Endat 2.2 actual value channel.
Only available with appropriate operating system version.
Example:
set MT2 6
3.12.1.1 SSI motor type (2)
With this motor type, an SSI absolute value encoder can be used for the acquisition of actual values. This
type is valid for stepper and servo axes. For the configuration of the SSI parameters, the environment
variables SSIF and SSIP can still be set. These have to be set in an axis-specific way. The
“?” character
represents the axis index 0...7.
With SSIF the clock frequency can be reduced for reading the encoder. The wished frequency is entered as a
value in Hz between 100 kHz and 4 MHz. The default value is 500 kHz. For long transmission lines the
frequency must be generally reduced.
By assigning the environment variable SSIBIN? with the value 1, encoder axes can be set on binary code.
Default: Gray code (see also section 5.2.6.1.).
Further notes on the configuration of SSI absolute encoders:
•
The unit for the encoder resolution in the system file must usually be
set to “Pulses” with SSI encoders
(With
“Slits”, the electronic quadruplication of incremental encoder signals is taken into account).
•
The number of SSI pulses indicated with SSIP exceeds the number of user data bits by 2 (the default for
SSIP is 26
– suitable for 24-bit encoders)
3.12.1.2 INC PWM motor type (3)
This motor type has an incremental encoder for the acquisition of actual value and a pulse width modulated
output signal (PWM) as command value. The PWM output has a basic frequency of 20 kHz and a resolution
of 3500 steps with the APCI-8001 (3333 steps with the APCI-8008) plus sign and is available as RS422
signal at the pins servo/puls+ and AGND/puls-. For this option a specific firmware RWMOS.ELF is
necessary. In mcfg, this axis has to be set as SERVO. This option is not available for axes which can also be
defined as STEPPER.
Summary of Contents for APCI-8001
Page 4: ......
Page 47: ...CM COMMISSIONING MANUAL 47 5 4 APCI 8001 component mounting diagram ...
Page 48: ...48 CM COMMISSIONING MANUAL 5 5 APCI 8001 component mounting diagram bottom side ...
Page 49: ...CM COMMISSIONING MANUAL 49 5 6 APCI 8008 component mounting diagram ...
Page 50: ...50 CM COMMISSIONING MANUAL 5 7 APCI 8008 component mounting diagram bottom side ...
Page 51: ...CM COMMISSIONING MANUAL 51 5 8 APCI 8008 STP EVAI component mounting diagram ...
Page 52: ...52 CM COMMISSIONING MANUAL 5 9 APCI 8008 STP EVAI component mounting diagram bottom side ...





















































