





























4 Repair
4.3.1. Replacement of cable unit, axes 1-3
83
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
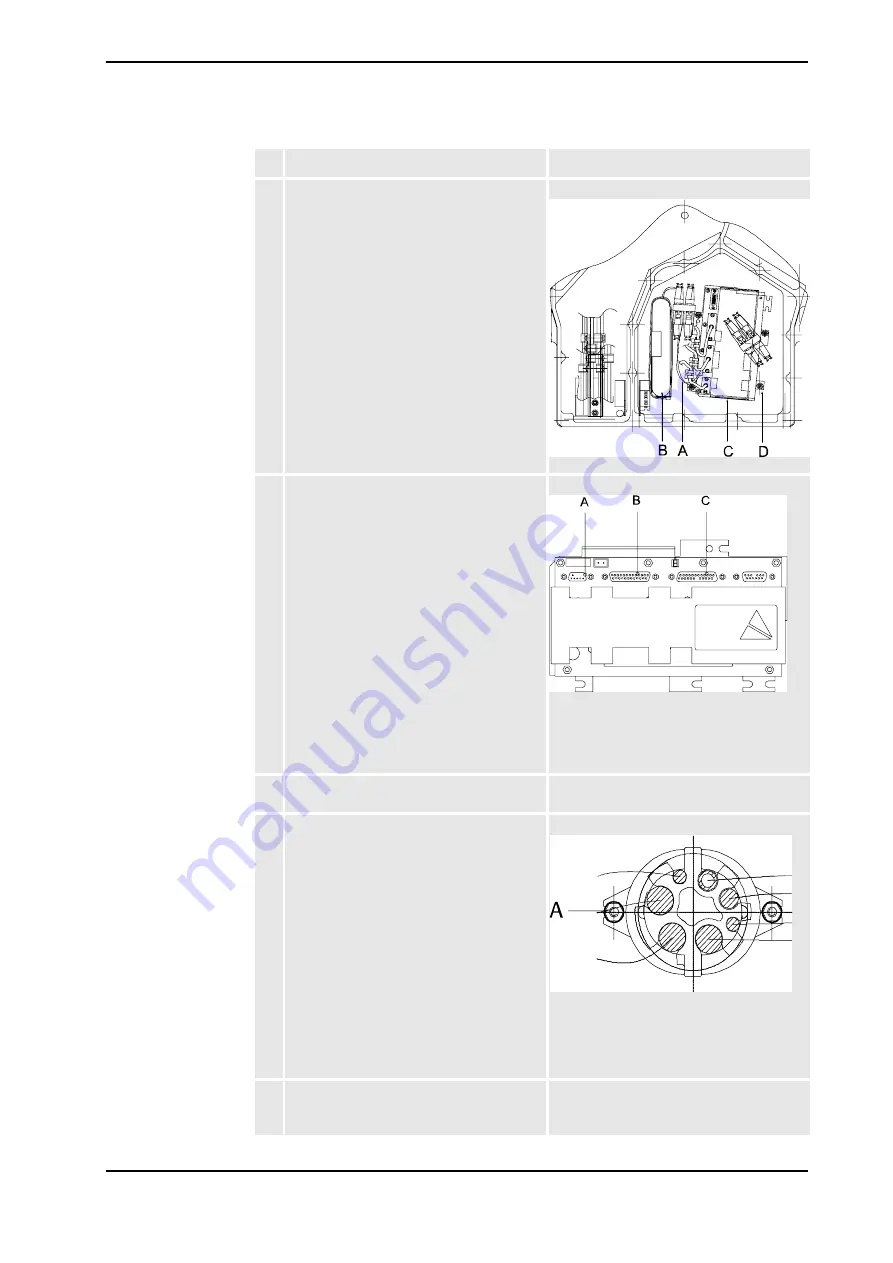
6. Loosen the nuts (D) and remove the SMB
unit carefully from the bracket.
The cable (A) between the battery (B) and
the SMB unit (C) may stay connected, in
order to avoid recalibration of the robot. Be
careful not to let the weight of the SMB unit
strain the cable!
In order to remove the SMB unit
completely, the connector R2.G must be
disconnected! This causes a necessary
recalibration of the robot!
xx0200000398
7. Disconnect the connector R2.FB 1-3 from
the connection R2.SMB1-4 (C) on the SMB
unit.
xx0200000400
A. R2.SMB
B. R2.SMB3-6
C. R2.SMB1-4
8. Unscrew the four screws securing the
cable gland.
This releases the cable harness from the
frame.
9. Remove the cable guide in the middle of
the frame by removing the attachment
screws of the holder (A).
Remove the cables from the guide.
xx0200000404
Note!
Different robot versions are fitted
with different versions of the holder. Make
sure the correct one is used to avoid cable
failure.
10. Remove the upper bracket securing the
cables to the arm house by unscrewing its
two attachment screws.
Note!
Do not remove or loosen any of the
cable brackets from the new harness, the
angle of the brackets is factory optimized.
Action
Note/Illustration
Continued
Continues on next page
Summary of Contents for IRB 2400/L
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......