





























Weight, robot
The table shows the weight of the robot.
Weight
Robot model
IRB 1600/IRB 1600ID: 250 kg
IRB 1600/1660ID
IRB 1660ID: 260 kg
Note
The weight does not include tools and other equipment fitted on the robot.
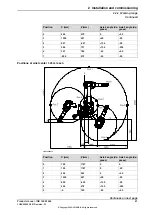
Loads on foundation, robot
The illustration shows the directions of the robots stress forces.
The directions are valid for all floor mounted, suspended and inverted robots.
xy
xy
z
z
T
F
F
T
xx1100000521
Force in any direction in the XY plane
F
xy
Force in the Z plane
F
z
Bending torque in any direction in the XY plane
T
xy
Bending torque in the Z plane
T
z
The table shows the various forces and torques working on the robot during different
kinds of operation.
Note
These forces and torques are extreme values that are rarely encountered during
operation. The values also never reach their maximum at the same time!
Continues on next page
Product manual - IRB 1600/1660
51
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
2 Installation and commissioning
2.2.1 Pre-installation procedure
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......







































































