











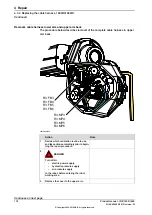

















Clamp
B
R4.FB5
C
R4.FB6
D
R4.MP6
E
R4.MP5
F
R3.MP5
G
R3.MP6
H
R3.FB5
I
R3.FB6
J
Note
Action
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the
robot working area.
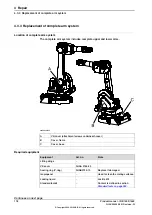
1
Described in section:
•
IRB 1600ID:
•
IRB 1660ID:
Remove the upper arm tube.
2
xx0700000113
Remove all the Torx pan head
screw (A) holding the cover.
3
A Torx pan head screw M6x12
B Hexagon nut with flange M5
Continues on next page
176
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.3.2 Replacing the cable harness, 1600ID/1660ID
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......







































































