




























Removing the wrist unit
Use this procedure to remove the complete wrist unit.
Note
Action
Decide which calibration routine to use, and
take actions accordingly prior to beginning
the repair procedure.
1
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot work-
ing area.
2
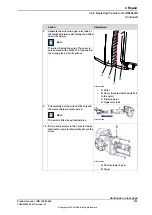
Shown in
Remove all extra equipment fitted on upper
arm and wrist.
3
xx0700000092
The plug (A) in figure covering the screw (C).
Remove the plug using standard tools (B).
Remove the screw for looking of motor axis
5, (C) in figure
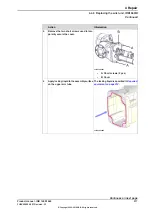
4
A Plug
B Standard tool,
C Hexagon socket head screw
M5X16 (Short head)
xx0700000054
A VK-Cover
Remove the VK-Cover.
5
Gently pull the cables out through the hole
for the VK- cover in the armtube.
6
Continues on next page
208
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.5 Replacing the wrist unit, IRB 1600ID
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......





















































