





























ZMC460N Motion Controller User Manual V1.5
Use RJ45 network cable connection method:
⚫
When installing, hold the crystal head with the cable and insert it into the RJ45
interface until it makes a "click" sound (kada).
⚫
In order to ensure the stability of communication, please fix the cables with cable ties.
⚫
When disassembling, press the tail mechanism of the crystal head and pull out the
connector and the module in a horizontal direction.
Please use tube-type pre-insulated terminals and cables with appropriate wire
diameters to connect the user terminals.
3.11.
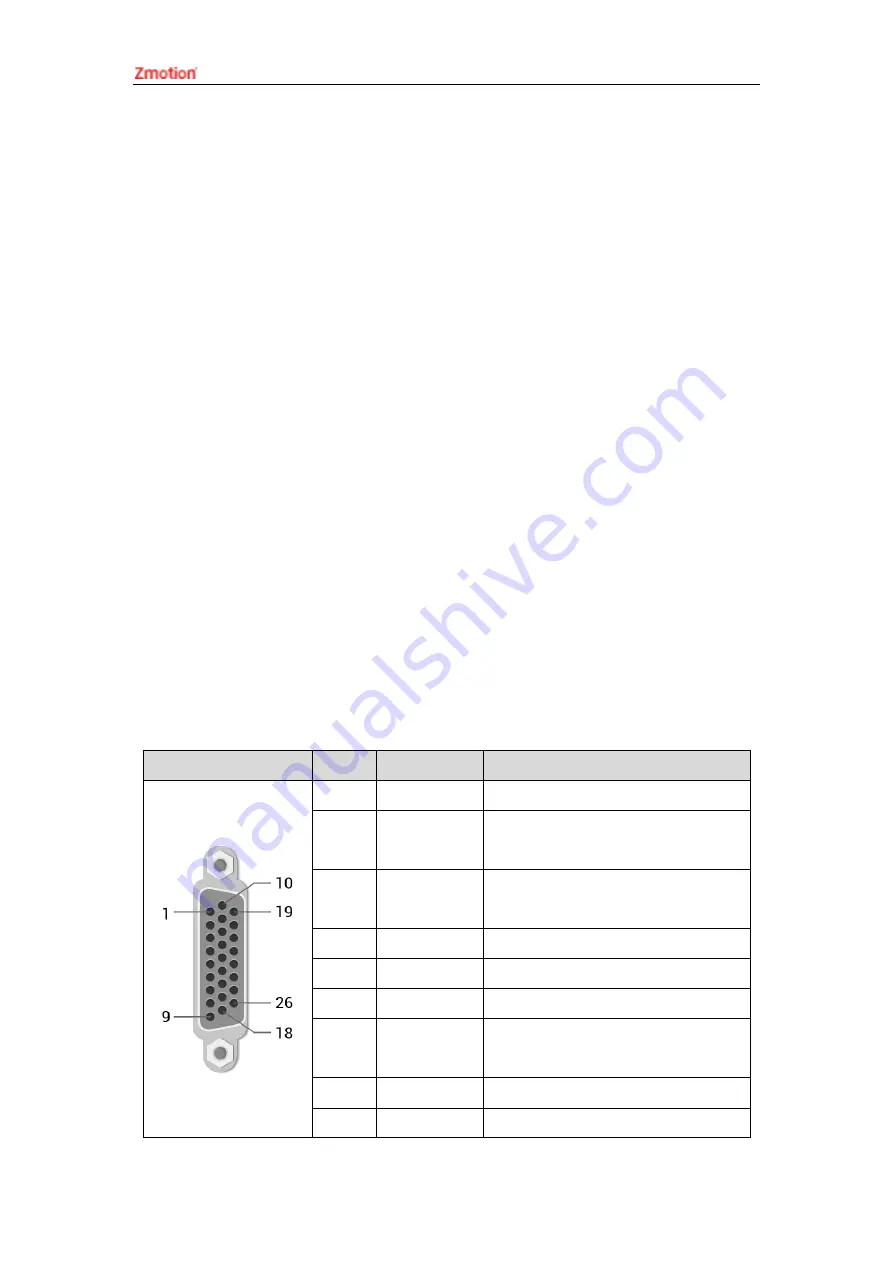
AXIS Differential Pulse Axis Interface
This product provides 6 local differential pulse axis interfaces, each interface is a
standard DB26 female socket. Each terminal provides 0V and +5V output, which can
provide 5V power for the encoder.
Before the axis is used, the use mode of the axis must be configured through the
ATYPE parameter.
→
Interface Definition
Interface
Pin
Signal
Description
1
EGND
Negative pole of IO 24V power
2
IN24-
29/ALM
General input (recommended as
driver alarm)
3
OUT12-
17ENABLE
General output (recommended as
driver enable)
4
EA-
Encoder differential input signal A-
5
EB-
Encoder differential input signal B-
6
EZ-
Encoder differential input signal Z-
7
+5V
Positive pole of 5V power of
pulse/encoder signal
8
Reserved
Reserved
9
DIR+
Servo or step direction
Содержание ZMC460N
Страница 1: ......







































































