





























ZMC460N Motion Controller User Manual V1.5
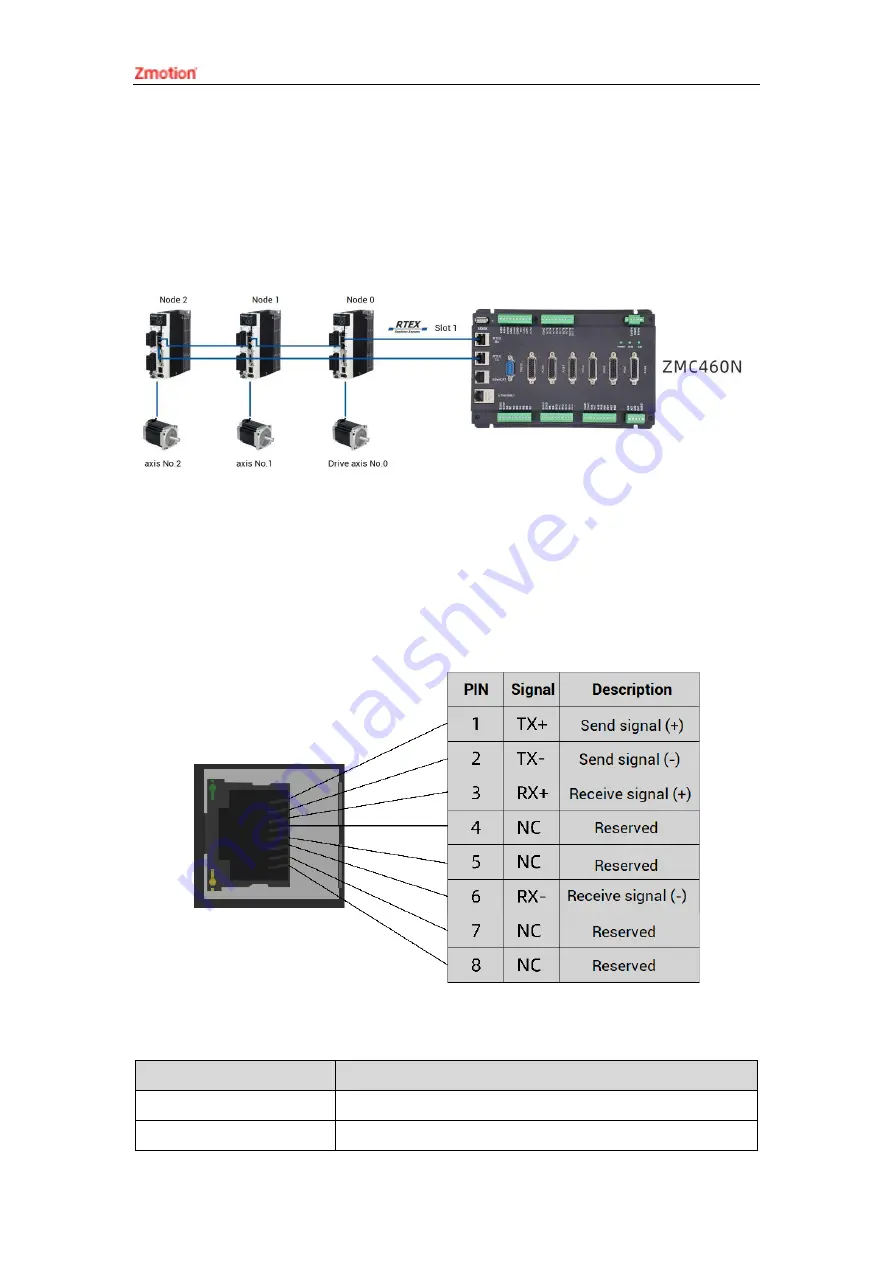
the RX port of the second drive, and so on, and the TX port of the last drive is connected
to the RX port of the controller to form a complete communication loop.
Device numbers and drive numbers are automatically numbered starting from 0 in
connection order, the same as the EtherCAT bus numbering convention.
See the configuration diagram below for the wiring method of RTEX:
3.10.
EtherCAT Bus Interface
ZMC460N motion controller has a 100M EtherCAT communication interface,
supports EtherCAT protocol, and connects to EtherCAT driver or EtherCAT expansion
module. The pin definition diagram is as follows:
→
Specification
Item
Specification
Communication protocol
EtherCAT protocol
Valid service
CoE
(
PDO
、
SDO
)、
FoE
Содержание ZMC460N
Страница 1: ......







































































