





























Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5-91
n
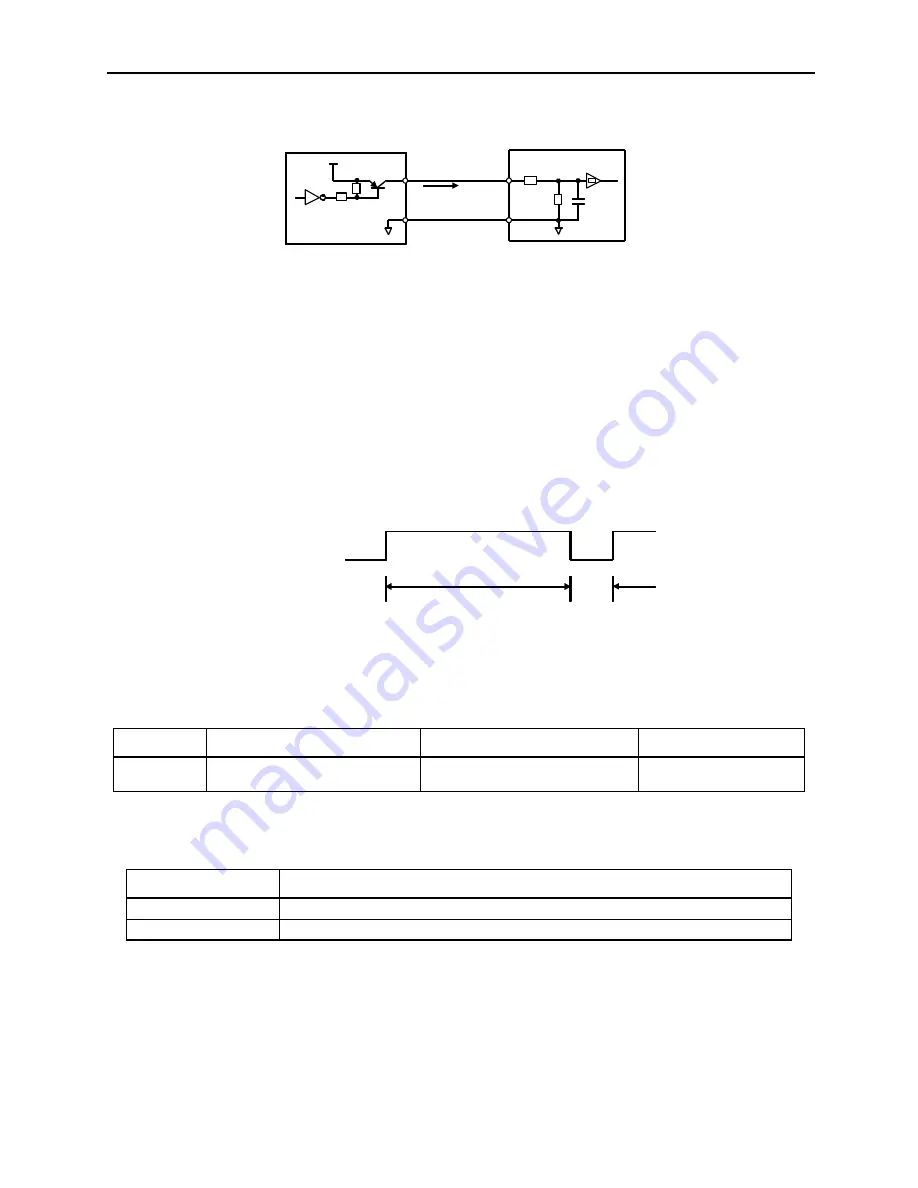
SEN Signals
•
Wait at least three seconds after turning on the power before raising the SEN sig-
nal to high level.
•
When the SEN signal is changed from low level to high level, the multi–turn data
and initial incremental pulses are transmitted.
•
The motor cannot be operated until these operations are completed, regardless of
the status of the servo ON signal (/S–ON).
Note: If for some reason it is necessary to turn OFF a SEN signal that is already ON, and then to turn it back
ON again, maintain the high level for at least 1.3 seconds before turning it ON and OFF.
5.7.2
Configuring an Absolute Encoder
Select the absolute encoder’s application with the following parameter.
Either “0” or “1” in the following table must be set in order to enable the absolute
encoder.
The following parameter is used to periodically clear the encoder’s counter (return
the setting to 0) after a designated ratio of motor to load axis revolutions. This func-
tion is called the multi-turn limit.
Note: The term Multi-turn Limit refers to the highest number of rotations the encoder’s counter will dis-
Parameter
Signal
Setting
Description
Pn002.2
Absolute Encoder Application
Setting Range: 0 or 1
Default Setting: 0
Speed/Torque Control,
Position Control
Pn002.2 Setting
Result
0
Uses the absolute encoder as an absolute encoder.
1
Uses the absolute encoder as an incremental encoder.
SEN
OSEN
Host controller
Servo amplifier
CN1-2
CN1-4
+5V
Approx. 1mA
at high level
0V
7406 or
equivalent
0V
1000
Ω
4.7k
Ω
1
µ
F
OFF
ON = high level
1.3s minimum
OFF
ON
15ms (minimum)
SEN signal







































































