





























10-
3
10
OTHER OPERA
TIONS
10-1 Initialization
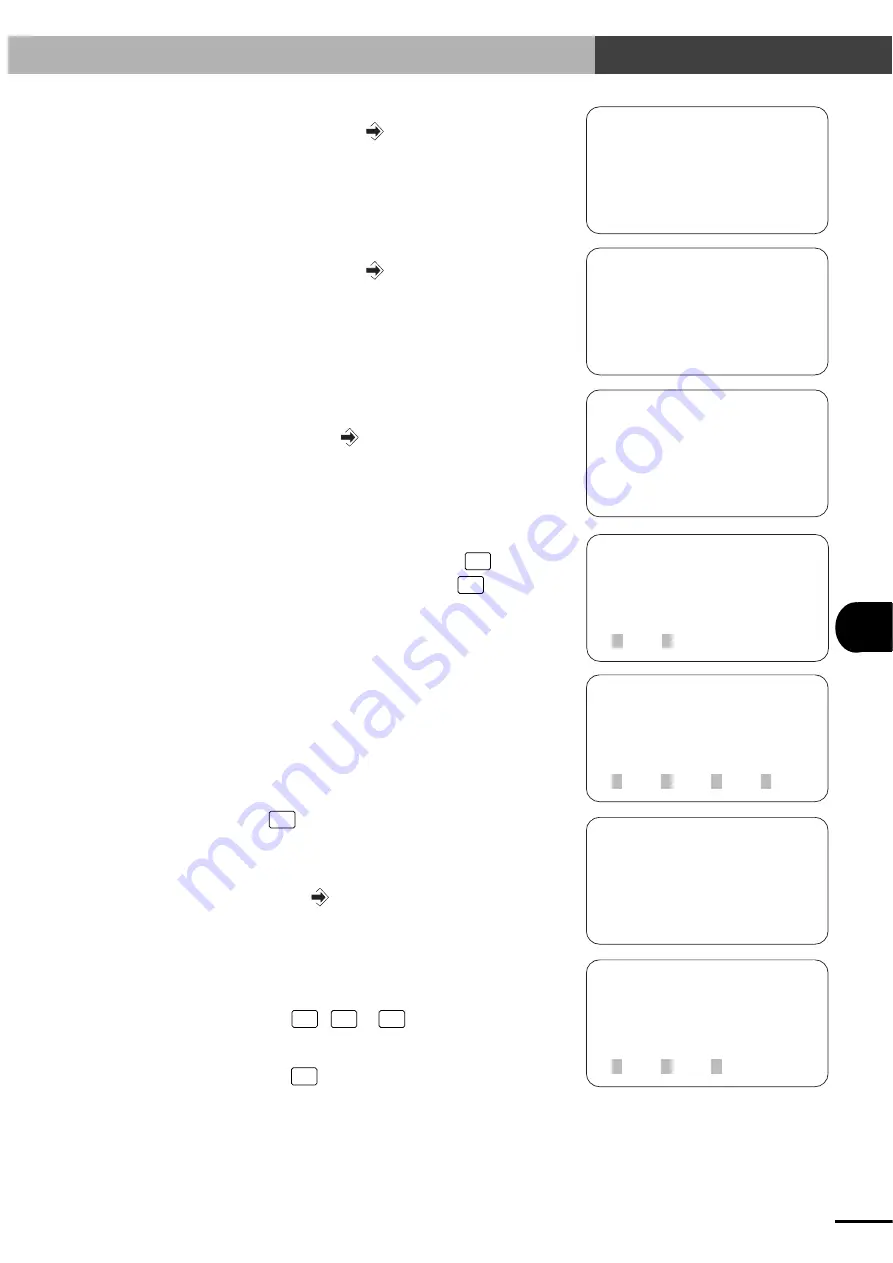
6) Enter the X-axis stroke with the number keys
and then press the
key.
[SYS-INIT-PRM-XY]
robot type : 110
X stroke : 450_ [mm]
[SYS-INIT-PRM-XY]
robot type : 110
X stroke : 450 [mm]
Y stroke : 350_ [mm]
[SYS-INIT-PRM-XY]
parameter data
initialize OK ?
1yes 2no
[SYS-INIT]
select menu
1PGM 2PNT 3PRM 4ALL
[SYS-INIT-PRM-FLIP]
X robot type: _
refer to
robot type table
[SYS-INIT-PRM-XY]
robot type : 110
Weight : 3_ [Kg]
[SYS-INIT-PRM-FLIP]
X robot type: 20
select X lead type
15.0 210.0320.0
7) Enter the Y-axis stroke with the number keys
and then press the
key.
8) Next, enter the robot payload
Use the number keys to enter the payload and
then press the
key.
9) A confirmation message appears on the screen.
To execute the initialization, press
F1
(yes).
To cancel the initialization, press
F2
(no).
10)When the initialization is complete, the screen
returns to step 3.
11)If
F2
(FLIP) was selected in step 4, the screen
shown on the right appears.
Enter the type number of the robot connected
to the X-axis with the number keys and then
press the
key.
For the robot number, see "15-1-2 Robot
number list".
12)When the robot having two or more different
lead lengths was selected in step 11, the dis-
play changes to the lead length selection screen.
Press
F1
,
F2
or
F3
key to select the ball
screw lead of the robot connected as the X-axis.
If the robot has 4 or more different lead lengths,
press
F4
(next) to switch the menu display.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание DRCX
Страница 3: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 9: ...vi MEMO Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 129: ...7 12 MEMO Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 207: ...9 16 MEMO Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 233: ...10 26 MEMO Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 281: ...12 10 MEMO Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 310: ...MEMO Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...