





























32
5
Run the servo system
5-1
.
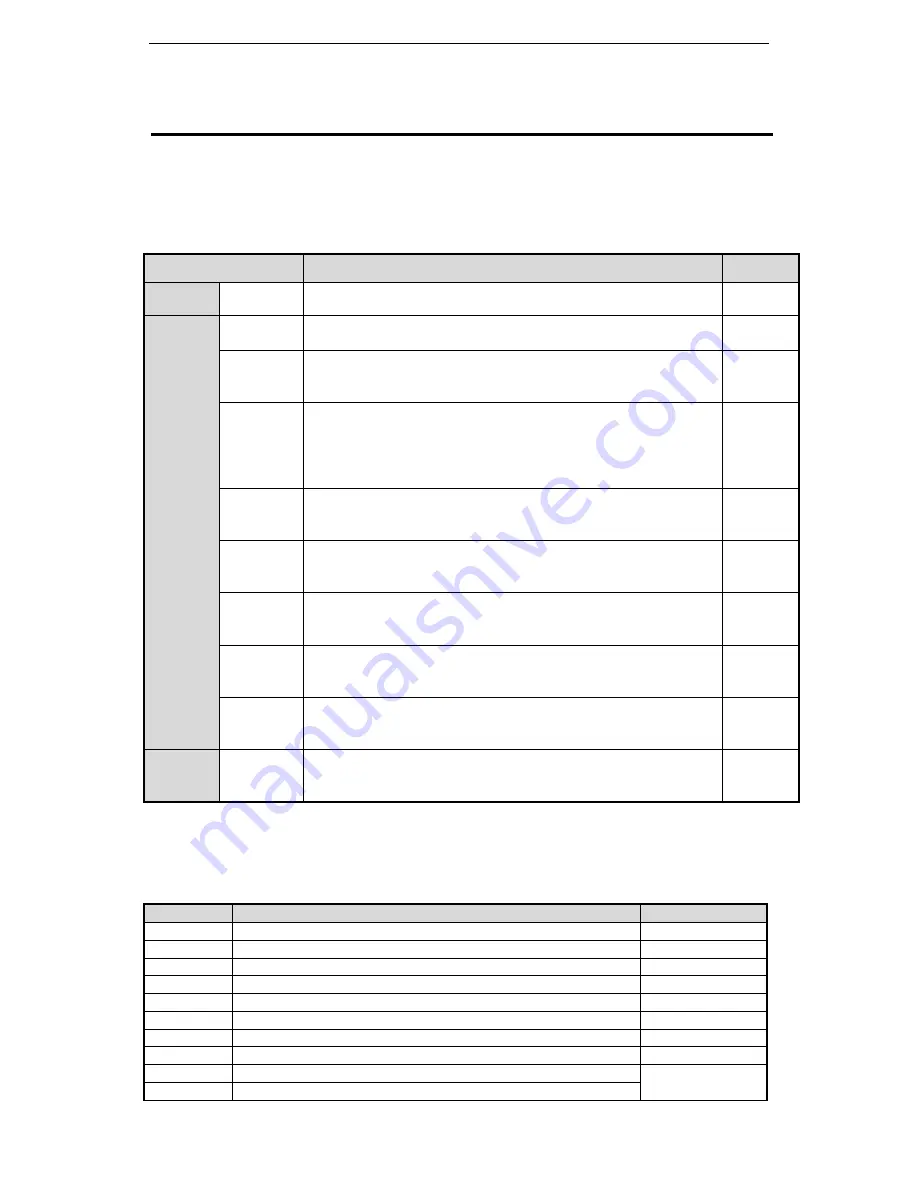
Control mode selection
DS2 series servo has one main mode and two sub modes. Sub mode 1 and 2 can be
switched to each other via /C-SEL signal.
Parameter
Control mode
Reference
P0-00
0
Testing mode, users cannot change!
P0-01
Sub
mode1
0
Idle mode
The motor will not power on even if the servo drive enables.
1
Torque control (internal setting)
Control the output torque of servo motor via operating panel or
communication.
5-9
2
Torque control (analog voltage command)
Control the output torque of servo motor via analog voltage
command. It is mostly used to close-loop torque control with upper
device, such as tension control. (If servo drive doesn’t have analog
input port, it cannot use this mode.)
5-8
3
Speed control (internal speed setting)
Use /SPD-D, /SPD-A, /SPD-B to select the speed which is set in
the servo drive. The servo drive can set 3 speeds.
5-6
4
Speed control (analog voltage command)
Control the speed of servo motor via analog voltage command. It is
mostly used to close-loop speed control with upper device.
5-5
5
Position control (internal position command)
Control the position via internal position command; it can set pulse
quantity and torque.
5-4
6
(default
setting)
Position control (external pulse command)
Control the position of servo motor via pulse command. Control the
position via pulse quantity; control the speed via pulse frequency.
5-3
7
Speed control (pulse frequency command)
Control the speed of servo motor via pulse frequency, but not
control the position.
5-7
P0-02
Sub
mode2
Same
as
sub mode 1
The servo will enter sub mode2 when /C-SEL signal is effective.
5-10
5-2
.
Basic function setting
Parameter
Name
Reference
P5-10
Servo ON setting /S-ON
5-2-1
P0-05
Switch the motor rotate direction
5-2-2
P0-06
Motor stop mode setting
5-2-3
P4-06
Servo immediately stop torque
5-2-3
P5-12
Prohibit forward running /P-OT
5-2-4
P5-13
Prohibit reverse running /N-OT
5-2-4
P5-34
Power-loss brake /BK
5-2-5
P5-37
Alarm output
5-2-6
P0-20
Run time
5-2-7
P0-21
Alarm times







































































