














© Vestamatic GmbH
Ar
t.-Nr
.:
84501110 E1 •
V
estamatic GmbH • Dohrw
eg 27 • D-41066 Mönchengladbach • www
.v
estamatic.com
IF SMI KNX 24VDC
Subject to modifications.
10/15
G
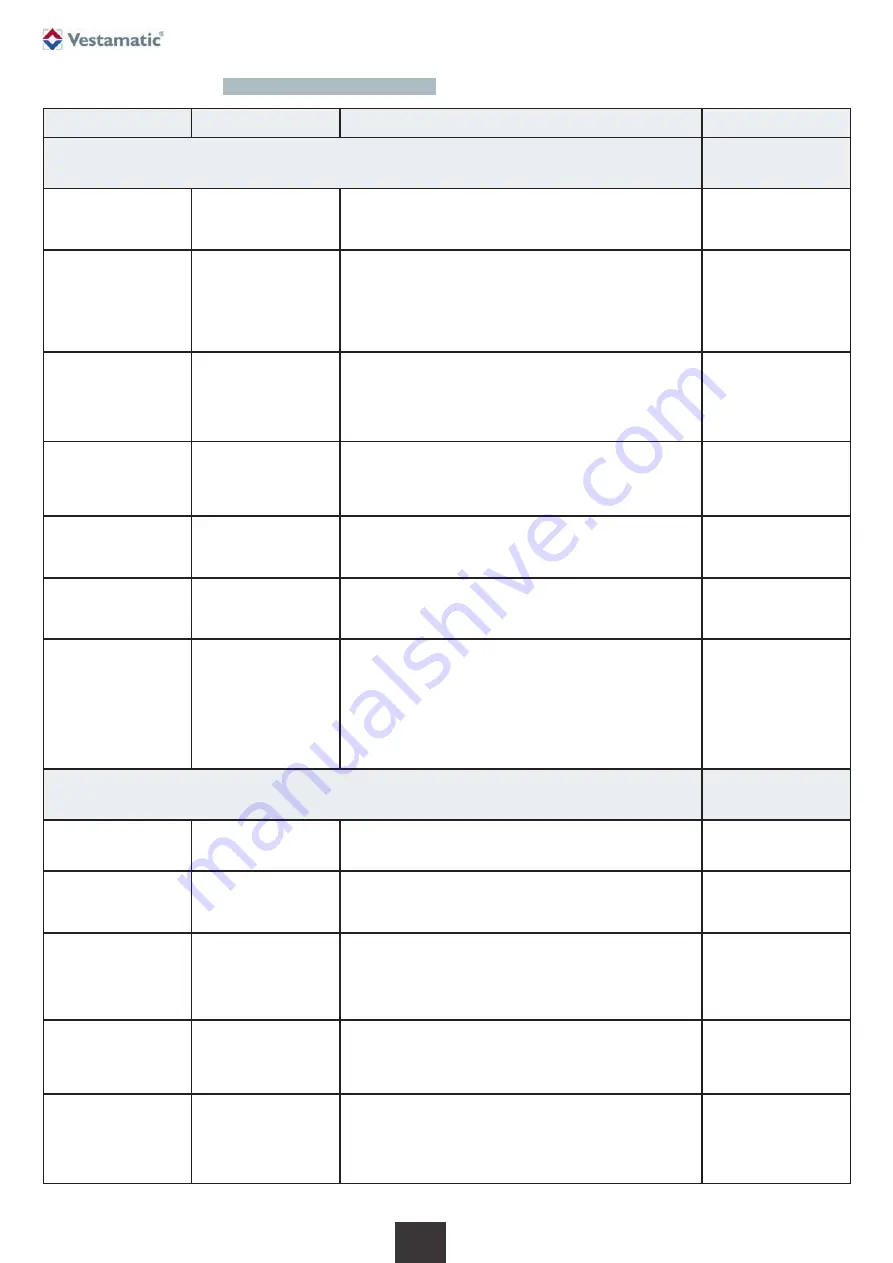
ETS parameters
(Parameter presets are in bold)
Parameter
Setting
Description
Dependent on
Safety
(e.g. wind alarm)
released
locked
This parameter can be used to set whether the safety object
and the safety function are active for all channels.
Travel command
for safety
no action
travel upwards
travel downwards
This parameter can be used to determine whether all drives
need to travel upwards, travel downwards or keep their position
in the event of a safety alarm. Independent of this parametri-
sation, all incoming travel commands via the EIB are locked
if the safety function is released and switched on.
and safety
= “released”
Restore positions
after all-clear
locked
released
If automatic mode is deactivated for all channels, this parameter
can be used to indicate that %-positions, which were received
as manual mode objects, should be moved to again or moved
to subsequently following the safety alarm all-clear.
and automatic mode
= “locked”
Travel command lock
released
locked
This parameter can be used to set whether the travel command
lock is active for all channels. If the lock is released and switched
on, all incoming travel commands via the EIB will be blocked.
Automatic mode
locked
released
This parameter can be used to determine whether all channels
support automatic mode. If the “Released” setting is selected, the
objects “Sunshade”, “Position of sunshade” and “Position of slat
angle” will only be effective if automatic mode is active. Other-
wise they will just be stored and only implemented at a later
stage when automatic mode is activated. If the “Locked” setting
is selected, the objects “Position of sunshade” and “Position of
slat angle” will be interpreted as manual mode objects.
Behaviour during bus
voltage failure
no action
travel upwards
travel downwards
This parameter can be used to determine whether all drives
need to travel upwards, travel downwards or keep their position
during bus voltage failure.
Behaviour during bus
voltage recovery
no action
travel upwards
travel downwards
This parameter can be used to determine whether all drives
need to travel upwards, travel downwards or keep their position
when bus voltage is recovered.
“Administration” tab
Parametrisation
of drives = “all equal”
Shade type
Blind
Roller shutter
This parameter can be used to determine which type of shade
is controlled on all channels.
Factor for the number
of degrees of angle for
step command (Basis 2°)
0–255
5
This parameter can be used for setting the increment for a
step command for all channels.
Factor for the number
of degrees of angle for
the adjustment during
sunshade positioning
(Basis: 2°)
0–255
30
This parameter can be used for determining the angle for
adjustment in the lower sunshade position for all channels.
and shade type
= “blind”
Number of degrees of
angle for upward travel
from lower end position
(Basis: 2°)
0–255
30
This parameter can be used for determining the angle for
upward travel from the lower end position for all channels.
This can be used to tauten the cloth of awnings.
and shade type
= “roller shutter”
Adjust upwards after
manual downward
travel
locked
released
This parameter can be used to determine whether, for all channels,
an upward adjustment by the angle given by the parameter
“Adjustment during positioning of lower position” occurs in the case
of manual downward travel. An upward adjustment will then also
occur if a manual downward movement is interrupted by a stop.
“Mechanics” tab
Parametrisation
of drives = “all equal”







































































