





























TMCM-3314 TMCL
™
Firmware Manual • Firmware Version V1.11 | Document Revision V1.10 • 2019-JAN-25
114 / 144
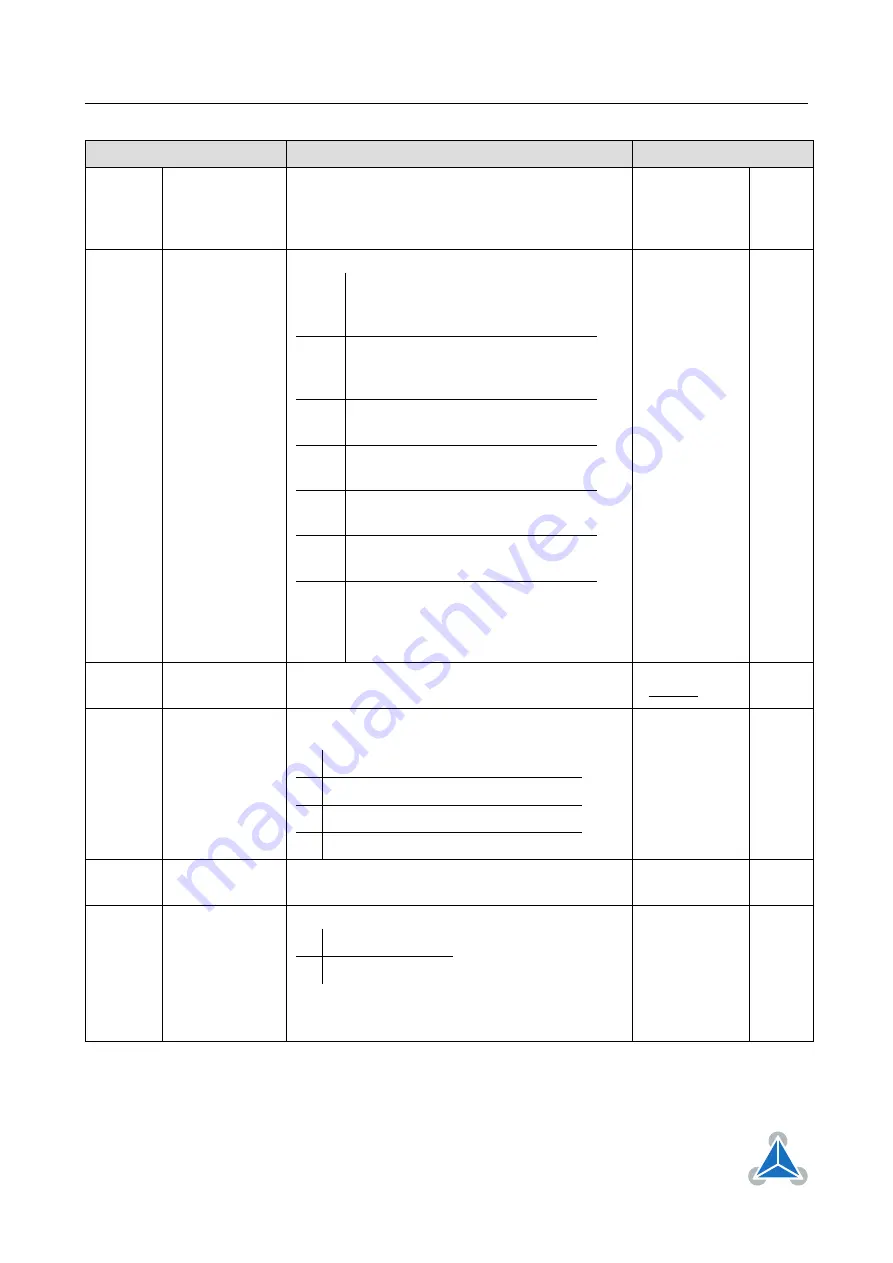
Number
Axis Parameter
Description
Range [Units]
Access
200
Boost current
Current used for acceleration and deceleration
phases. If set to 0 the same current as set by
axis parameter #6 will be used. Same scaling as
with axis parameter #6.
0. . . 255
RW
201
Encoder mode
A combination of the following values:
Bit 0
Required channel A polarity for
null channel event.
(0: low, 1: high)
Bit 1
Required channel B polarity for
null channel event.
(0: low, 1: high)
Bit 2
Null channel polarity.
(0:low, 1: high)
Bit 3
Ignore channel A and B polarity for
null channel event.
Bit 4
Clear/latch encoder at every null
channel event.
Bit 5
Clear/latch encoder only at next
null channel event.
Bit 8
0: Latch encoder and actual posi-
tion on N event.
1: Also clear encoder counter on
N event.
0. . . 511
RW
202
Motor full step
resolution
Full step resolution of the motor (Default: 200).
0. . . 65535
[
f ullsteps
round
]
RW
204
Freewheeling
mode
Stand
still
option
when
the
standby
current
(parameter
7)
is
set
to
zero.
0
normal operation
1
freewheeling
2
coil shorted using low side drivers
3
coil shorted using high side drivers
0. . . 3
RW
206
Actual load
value
Readout of the actual load value used for stall
detection (StallGuard2).
0. . . 1023
R
207
Extended error
flags
A
combination
of
the
following
values:
1
StallGuard error
2
deviation error
These error flags are cleared automatically
when this parameter has been read out or when
a motion command has been executed.
0. . . 3
R
©2019 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at







































































