

















TMCM-035 Manual (V2.09 / February 27
th
, 2009)
6/18
Copyright © 2007-2009, TRINAMIC Motion Control GmbH & Co. KG
2.2
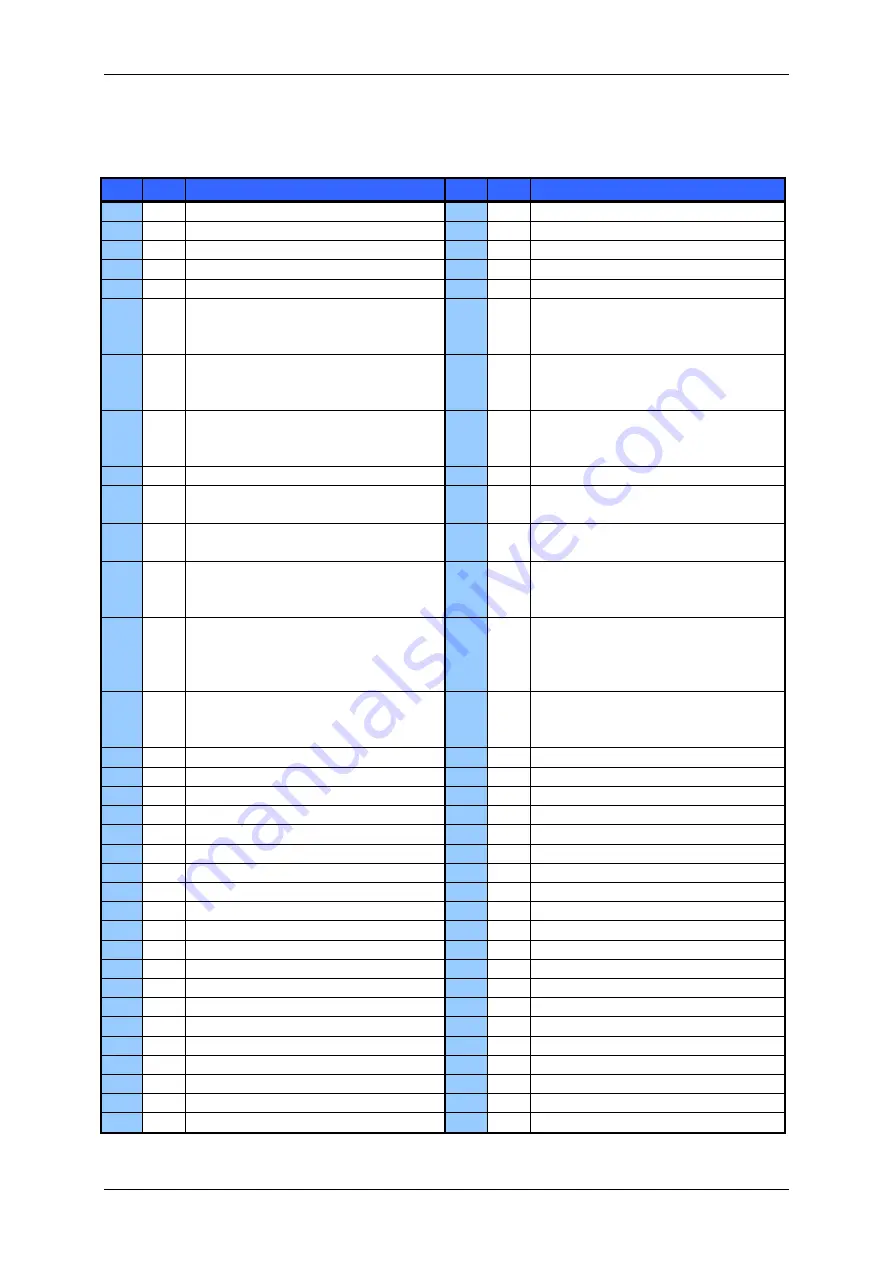
Connecting the Module
The pin assignments of the connector are as follows:
Pin Dir.
Description
Pin Dir.
Description
1
In +5VDC (+/- 5%) I
max
=50mA
2
In GND
3
In +5VDC (+/- 5%)
4
In GND
5
In V_Motor (+14 to 50VDC)
6
In GND
7
In V_Motor (+14 to 50VDC)
8
In GND
9
In V_Motor (+14 to 50VDC)
10
In GND
11
In ENN (0 = enable driver)
12
In
Step/Dir mode: do not connect
SPI mode: TMC239 CLK signal
Analog mode:TMC239 MDBN signal
13
In
Step/Dir mode: do not connect
SPI mode: TMC239 CSN signal
Analog mode: TMC239 PHB signal
14
Out
Step/Dir mode: do not connect
SPI mode: TMC239 SDO signal
Analog mode: TMC239 ERR signal
15
-
n. c.
16
In
Step/Dir mode: do not connect
SPI mode: TMC239 SDI signal
Analog mode: TMC239 PHA signal
17
In Reset (active low), leave open
18
In Step In
19
In
SPE (0 = Analog mode,
1=SPI or Step/Dir mode)
20
In Dir In
21
In INA
22
In
SDEN: must be to 1 for Step/Dir
mode or 0 for SPI or Analog mode
23
In INB
24
In
STEP16: Step/Dir mode only:
1 = 16 resp. 64 microsteps
0 = 8 resp. 32 microsteps
25
In
SPI mode: ANN (INA and INB provide
current reference if 0)
Step/Dir mode: do not connect
Analog Mode: TMC239 MDAN signal
26
In
USEMD: Set to 1 to use mixed decay
in Step/Dir mode
27
In
/STEP64EN: Leave open or tie to +5V
for 8 / 16 microsteps, tie to GND for
32 / 64 microstep resolution
28
In
OSC: leave open or supply external
chopper clock
29
-
n. c.
30
-
n. c.
31
-
n. c.
32
-
n. c.
33
-
n. c.
34
-
n. c.
35
-
n. c.
36
-
n. c.
37
Out OB2
38
Out OB2
39
Out OB2
40
Out OB2
41
Out OB1
42
Out OB1
43
Out OB1
44
Out OB1
45
In RSB2
46
In RSB2
47
In RSB1
48
In RSB1
49
Out OA2
50
Out OA2
51
Out OA2
52
Out OA2
53
Out OA1
54
Out OA1
55
Out OA1
56
Out OA1
57
In RSA2
58
In RSA2
59
In RSA1
60
In RSA1
61
In GND
62
In GND
63
-
n. c.
64
-
n. c.
65
-
n. c.
66
-
n. c.
67
-
n. c.
68
-
n. c.
Table 2.1: Pinout 68-Pin Connector







































































