


























Chapter 4
Parameters
Serial
numb
er
name
Features
Parameter
range
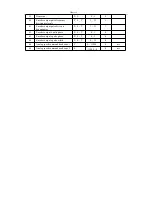
4
Control
method
selection
This parameter sets the drive control method:
0: position control mode;
1: speed control mode;
2: trial operation control mode;
3: jog control mode;
4: encoder zeroing mode;
5: Open loop operation mode (for testing motors and
encoders);
6: Torque control mode.
In the position control mode, the position command is
input from the pulse input port.
Speed
control mode, speed command input from
input terminal or analog input, determined by parameter
[inside and outside speed command selection]
(pa22).When using internal speed, the combination of
sc1 and sc2 is used to select different internal speeds:
Sc1 off, sc2 off : internal speed 1 sc1
on, sc2 off : internal speed 2 sc1 off,
sc2 on : internal speed 3 sc1 on, sc2
on : internal speed 4
Test run control mode, speed command input from the
keyboard, used to test the drive and motor.
Jog control mode, that is, jog mode, after entering jog
operation, press ↑ key and hold, the motor runs at jog
speed, release button, motor stops, keep zero speed;
press ↓ key and hold, motor press jog speed Run in
reverse, release the button, the motor stops and keeps at
zero speed.
The encoder zero adjustment mode is used to adjust the
encoder zero point of the motor factory.
0~6
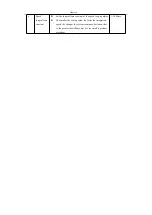
5
Speed
proportional
gain
Set the proportional gain of the speed loop regulator.
The larger the setting, the higher the gain and the greater
the stiffness.The parameter values
are determined
according to the specific servo drive system model and
load conditions.In general, the larger the load inertia, the
larger the set value.
Under the condition that the system does not oscillate, try
to set it larger.
5~2000Hz
Содержание SD300
Страница 87: ......
Страница 89: ...Chapter 7 Running 7 9 2 Operation l Set the parameter values ...







































































