

























6. Troubleshooting
3.
Causes and counter measures of alarms
6-5
TSC
3-1
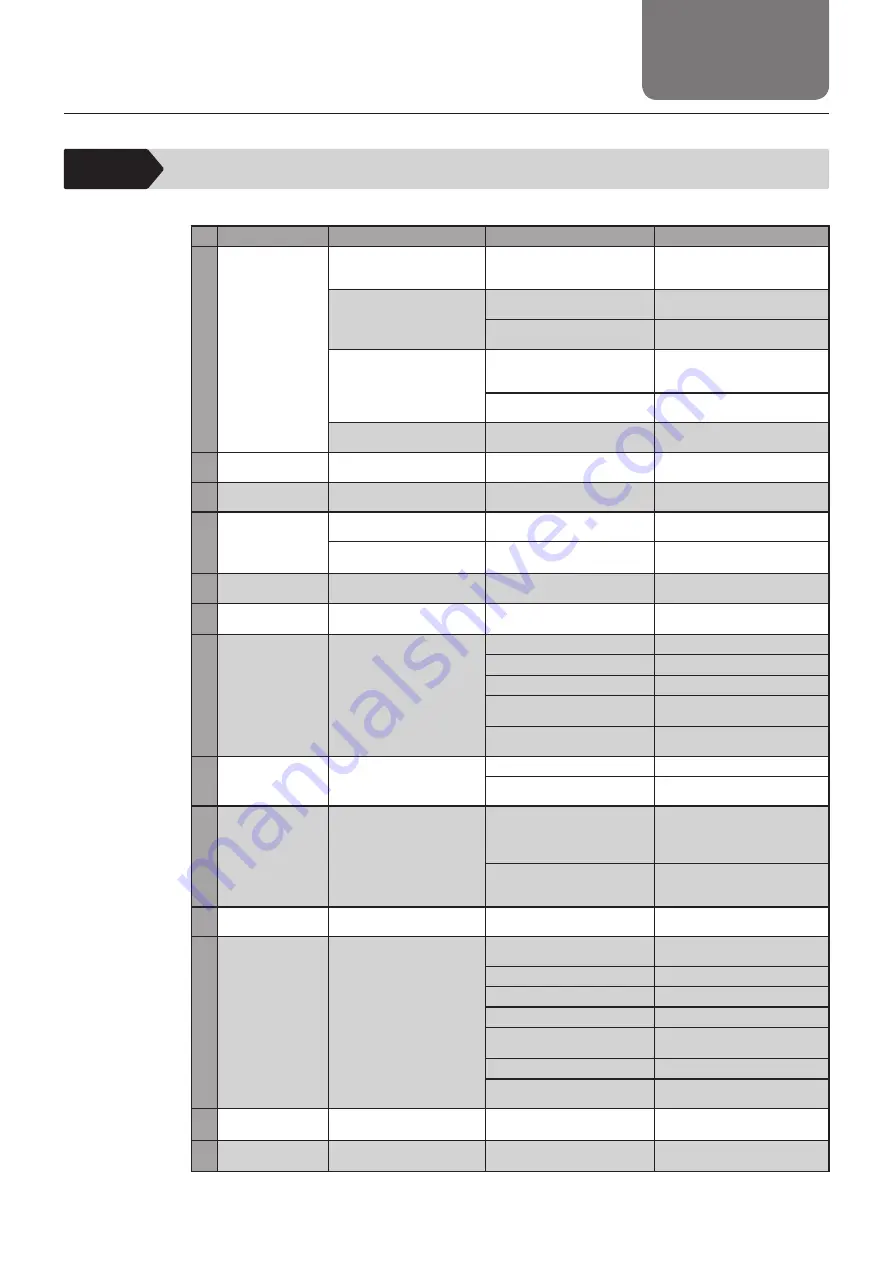
Causes and counter measures of alarms
No.
Alarm name
Generation status
Causes
Counter measures
1
Motor overvolt
When 24 V power is activat-
ed (Short-circuiting of CN4
and MPI to MPO is used)
Driver controller board
has a fault
Replace the driver controller
with new one
When MPO power is acti-
vated (Opening of CN4 and
MPI to MPO is used)
The input voltage is high
Set the input voltage within the
product specification range
Driver controller board
has a fault
Replace the driver controller
with new one
During normal operation
The input voltage is high
(depending on excessive volt-
age variation)
Set the input voltage within the
product specification range
Driver controller board
has a fault
Replace the driver controller
with new one
When the motor decelerates
in speed
The motor speed is high and
load mass is too large
Reconsider the load condition
and driving condition
2
Control overvolt
During 24 V power
energizing
The input voltage is high
Set the input voltage within the
product specification range
3
Control low-volt
During 24 V power
energizing
The input voltage is low
Set the input voltage within the
product specification range
11
Parameter error
When 24 V power is
activated
Driver controller board has a
fault
Replace the driver controller
with new one
When reading out or writing
in the parameter file
An inappropriate parameter
file has been selected
Select an appropriate param-
eter file
21
Move comm.
at SV OFF
When starting the normal
operation
Operation starting procedures
are not appropriate
Issue directive to move after
servo ON and zero return
22
Move comm.
befor ORG
When starting the normal
operation
Operation starting procedures
are not appropriate
Issue directive to move after
zero return
23
ORG time out
When in zero return
Actuator has a fault
Replace the actuator with new one
Motor has a fault
Replace the actuator with new one
Encoder has a fault
Replace the actuator with new one
Actuator connection cable
has a fault
Replace the cable with new one
Driver controller board
has a fault
Replace the driver controller
with new one
24
Writing error on
move
When entering external in-
put instruction mode writing
signal PWRT
Zero return was not completed Execute the zero return
The movement is going on
by manual operation
Enter the signal after the opera-
tion completely stops
25
Position data
anomaly
The program is being
executed
There is some fault
(omission, non-conformity,
unreason, etc.) in the data to
be executed
Correct the fault
Specify the target position
with function mode 5
in the relative coordinate
Specify the target position in
the absolute coordinate
31
Position comm. error
During normal operation
Driver controller board has a
fault
Replace the driver controller
with new one
32
Excessive position
error (deviation)
Positioning operation is
going on
Inhibition of operation by
external force
Remove the inhibitor
Actuator has a fault
Replace the actuator with new one
Motor has a fault
Replace the actuator with new one
Encoder has a fault
Replace the actuator with new one
Actuator connection cable
has a fault
Replace the cable with new one
Gain shortage
Readjust the gain
Driver controller board
has a fault
Replace the driver controller
with new one
33
Soft limit over
Positioning operation is
going on
Position setting is out of limit Set the position within the limit
34
Push & hold opera-
tion range over-error
During the pressing
operation
The amount of pressing is not
enough
Increase the Push[%]







































































