

















4
1 Introduction
1 2 3
4 5 6 7 8 9 10 11 12 13
14 15 16
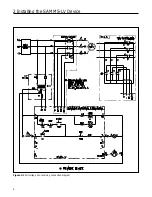
Figure 1.1
SAMMS-LV, front view
1.2.1 The SAMMS-LV Device Models
The SAMMS-LV device is available in two models: SAMMS-LVE
and SAMMS-LVX. Each model meets the various demands of
industrial and commercial specifications and installations. Table
1.2 compares the features of each model.
The SAMMS-LV device is designed for critical process control
where prevention of downtime is critical. It offers motor control
and protection along with motor diagnostic and motor/driven
equipment protection. Engineering and operating personnel
have access to important data enabling them to optimize
motor-driven equipment capabilities, maximize the process
system output and facilitate maintenance.
SAMMS-LVX is a full function model, applicable to all control
needs, from a simple across-the-line unit to a more compli-
cated reduced voltage scheme. It includes all of the functions
listed in table 3.7. Any of the standard control circuits listed in
table 3.3, or a custom circuit, may be downloaded. The
SAMMS-LVX device accepts up to four remote inputs, while
SAMMS-LVE accepts two remote inputs.
SAMMS-LVE is a model of SAMMS-LV tailored to across-the-
line (FVNR) applications. It provides all of the protective func-
tions of the SAMMS-LVX device, except that it has no jam
protection (F23), loss of load protection/alarm (F24), or process
current warning (F22) functions. Functions F3 and F5 associ-
ated with two-speed applications are not available. No provi-
sion for automatic reset (F8) is provided. SAMMS-LVE accepts
two remote inputs, and provides one output to actuate a single
contactor. An alarm contact is not available with SAMMS-LVE.
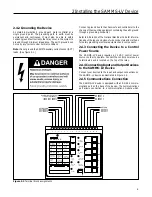
The SAMMS remote inputs are compatible with all PLCs and
electromechanical remote control devices that have a 120VAC
or 125VDC output signal.
1.2.2 Advanced Protection for
Low-Voltage Motors
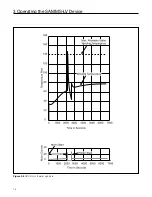
For advanced protection of low voltage motors, the SAMMS-LV
device uses a motor model algorithm that continually calculates
the stator winding and housing temperature as a function of the
motor rms current. The motor model compares the calculated
temperature to trip temperature values and provides a signal
that trips the motor off line when the motor reaches a trip
temperature value. The model closely emulates the heating and
cooling of the motor windings and provides protection against
both transient and steady-state overload conditions.







































































