





























•
Approach speed of the body or parts of the body (K)
•
Stopping time of the entire machine (T)
°
Response time of the safety system (t
SafetySystem
)
°
Robot stopping time (t
Robot
)
•
Supplements to protective field
°
Supplement to prevent reaching over (C
RO
) or reaching through (C
RT
)
The actual stopping/run-down time of the robot must be checked with a measurement.
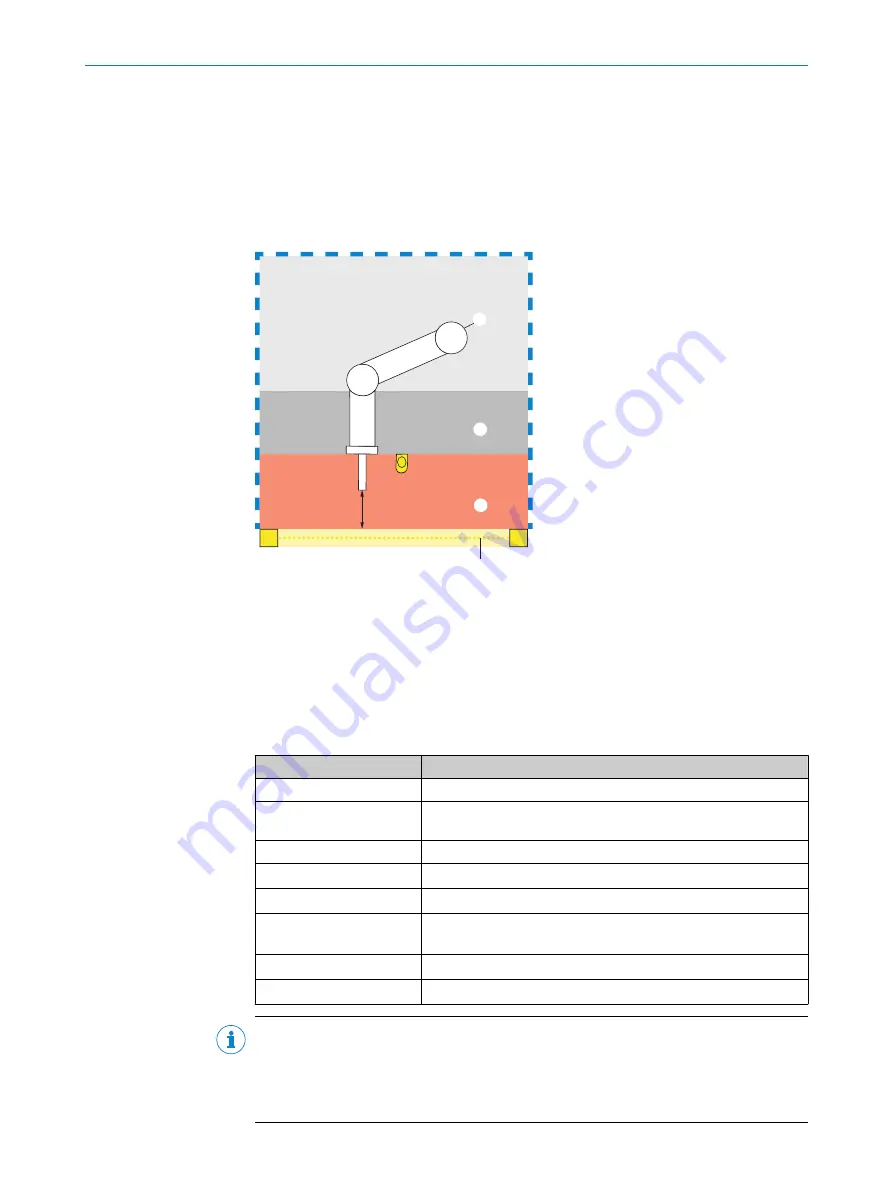
S
4
1
3
2
1
Robot arm
2
Human and robot interaction area
3
Protective field of secondary protective device (safety laser scanner)
4
Protective field of primary protective device (e.g. safety light curtain)
The safe minimum distance S is determined using the following formula:
S = (K × T) + C
Table 9: Variables in the calculation
Formula symbols
Meaning
S
Minimum distance to hazardous area
K
Approach speed of the body or parts of the body (2,000 mm/s
according to ISO 13855)
T
Stopping time of the entire machine in seconds
t
SafetySystem
Response time of safety system
t
Robot
Robot stopping time
C
Entry distance, C is the larger value of C
RO
(reaching over) and C
RT
(reaching through)
t
SafetyController
Safety controller response time
t
Relay
Response time of the interface or the relay
NOTE
It is also possible to use other primary protective devices than the stated deTec4
Core and deTem4 Core devices. Calculation on the minimum distance must take place
in accordance with ISO 13855 and the risk assessment. The documentation (SISTEMA,
block diagrams, etc) must be adapted accordingly by the manufacturer.
PROJECT PLANNING
4
8023421/12KF/2019-01-22 | SICK
O P E R A T I N G I N S T R U C T I O N S | sBot Stop
27
Subject to change without notice







































































