





























Rockwell Automation Publication 35-UM001A-EN-P - May 2022
161
Chapter 7 Configure the Armor PowerFlex Drive
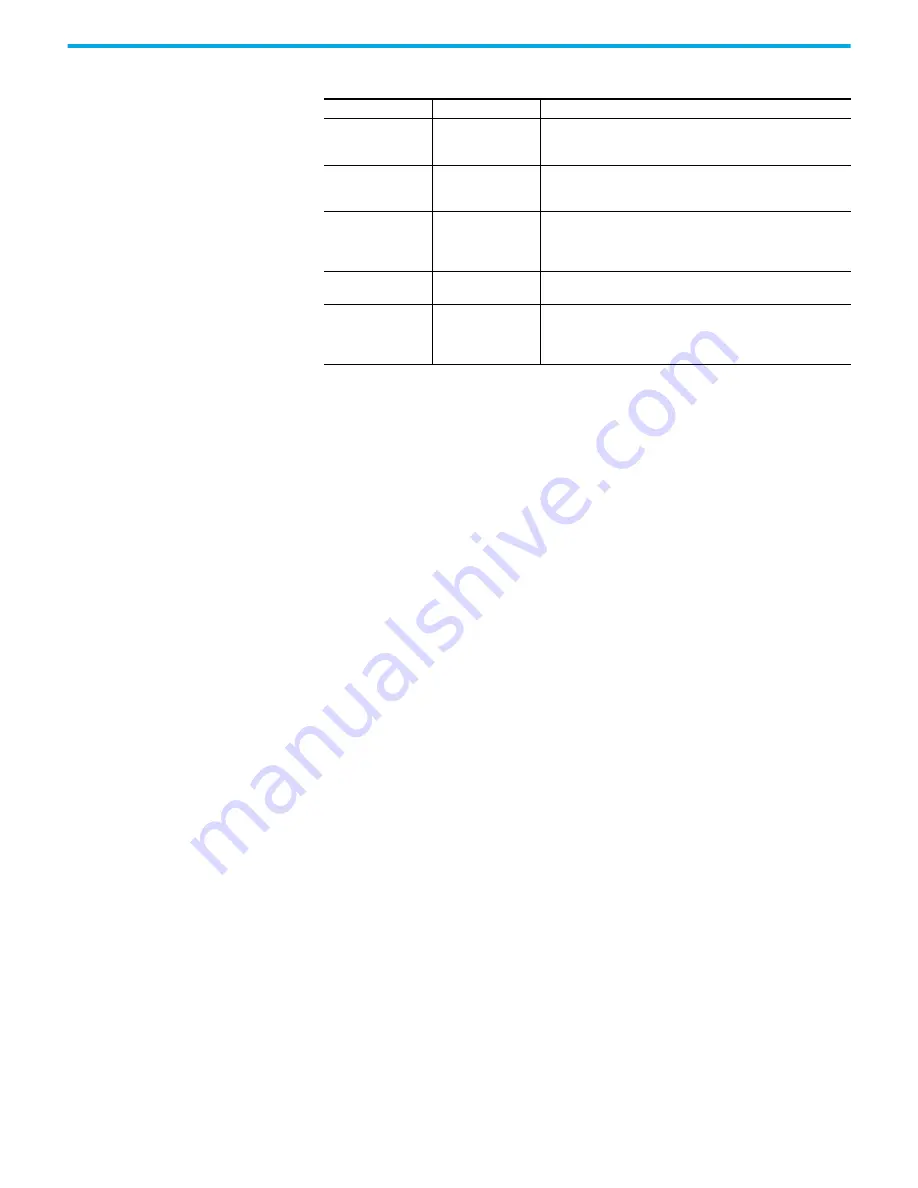
Table 62 - Encoder Feedback Parameters
Configure Velocity Control
Velocity control refers to controlling of the speed of a connected motor. A
speed is commanded by the user, and the motor control algorithms determine
the output to the motor necessary to achieve this speed.
Additionally, the motor control method and optional feedback device
determine how accurately the commanded speed can be met (closed loop
control versus open loop control).
The Velocity Control settings include: setting the velocity limits, enabling or
disabling the dynamic acceleration control, entering up to four preset values
for velocities, acceleration times, deceleration times, and s-curves, and setting
the minimum and maximum output frequencies.
Attribute
Range
Description
Polarity
Normal/Inverted
Choose between Normal (default) or Inverted as appropriate for
your application.
This is based on encoder rotation and evaluation requirements.
Cycle Resolution
1…20,000 cycles/rev
This setting is used in the Effective Resolution calculation. The
actual motor encoder cycle resolution. This is the raw encoder
cycle resolution of the motor or encoder device type.
Cycle Interpolation
4 (default)
This is used in the Effective Resolution calculation. The safety
primary-feedback interpolated counts as oppose to the motion
axis-feedback interpolated counts. For the Integrated Safety
Functions module, this value is 4 and cannot be changed.
Effective Resolution
1…80,000 cycles/rev
This calculated value is the product of cycle resolution and cycle
interpolation for the primary safety function evaluation.
Enable Velocity
Comparison
Diagnostic
Enable/disable
When enabled, this diagnostic compares the velocity that is
determined by the encoder and the predicted or estimated velocity
based on the motor control model. If the difference is too large, a
Feedback Velocity Comparison Failure fault occurs.
Содержание Allen-Bradley 35E
Страница 10: ...10 Rockwell Automation Publication 35 UM001A EN P May 2022 Table of Contents Index 223 ...
Страница 222: ...222 Rockwell Automation Publication 35 UM001A EN P May 2022 Appendix B Configure a Message Instruction Notes ...
Страница 225: ...Rockwell Automation Publication 35 UM001A EN P May 2022 225 Armor PowerFlex AC Drives User Manual ...





















































