

















14
Func.
Name
Description
Range of
Setting
Unit Default
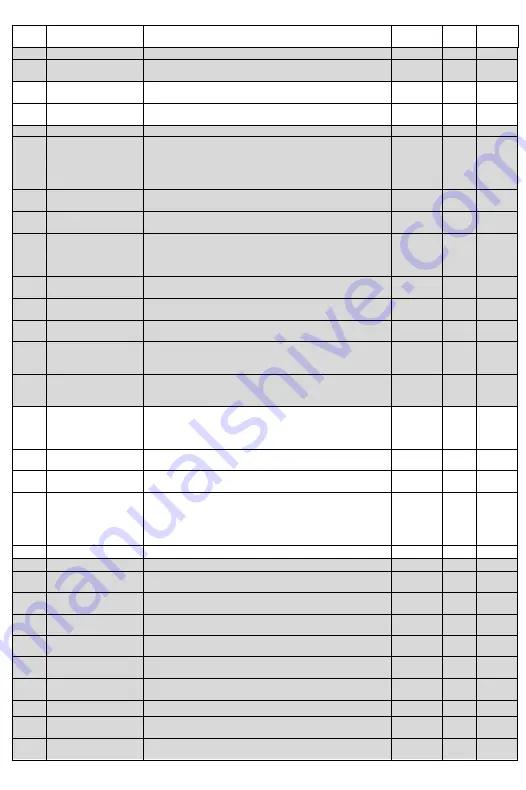
F_136
PID Error Gain
Set the gain for the error of PID.
0.1~8.0
─
1.0
F_137
Delay Time before
Stop
If “stop command” is activation at multi-funtion input
terminal, drive will delay the setting time before stop.
0~1200 1 sec
0
F_138
Overheating Level
Adjustment
Overheating level(OH)=setting level+85
℃
0.0~25.0 0.1
℃
0.0
F_139
Operation Condition
Memory
Record the last status of drive before power off.
0: Enable (F_001=2,3,4) 1: Disable
0,1
─
1
F_140
NTC Thermistor 0: Disable. 1: Enable.
0,1
─
1
F_141
Drive Overheating
Warning Selection
0: Disable
1: Warning (Ht): Continue operation.
2: Warning (Ht): Drive de-rates the switching
frequency automatically per 5 minutes.
3: Warning (Ht): Stop operation.
0~3
─
0
F_142
Drive Overheating
Warning Level
Set the warning level to prevent drive overheating.
45~85
1
℃
70
F_143
Drive Overheating
Dead Band
Set the temperature dead band of F_142 and F_145. 2.0~10.0 0.1
℃
3.0
F_144
Fan Control
Selection
0: Forced air: Start the fan at power ON.
1: Operation air: Start the fan at running.
2: Temperature level setting: Start the fan according
to the setting of F_145.
0~2
─
1
F_145
Temperature Level
of Fan Activation
Set the temperature level of fan activation.
25~60
1
℃
50
F_146
Minimum Operation
Time of Fan
Set the minimum operation time of fan when the fan
stops.
0.1~25.0 0.1min
0.5
F_147
“SV” Value
Set the “SV” value
F_152~
F_151
0.1unit
2.0
F_148 PID Control Display
0: PV value
2: Deviation value
4: PID feedback value
1: Integration value
3: PID command value
0~4
─
0
F_149
“SV-PV” Value
Display
Main display selection(under PID control and
command by “SV” condition)
0: “PV” value 1: “SV-PV” value
0,1
─
1
F_150
PID Control
Command
0: By F_002
1: Analong frequency command controls “SV”
2: Keypad conrols “SV”
3: Communication interface controls “SV”
0~3
─
2
F_151
Upper Limit of
Transmitter
Set the value in accordance with the maximum
specification of transmitter.
-800.0~
800.0
0.1unit 10.0
F_152
Lower Limit of
Transmitter
Set the value in accordance with the minimum
specification of transmitter.
-800.0~
800.0
0.1unit
0.0
F_153
PID Control Mode
Selection
0: Open-loop operation
1: Forward control; D postposition
2: Forward control; D preposition
3: Reverse control; D postposition
4: Reverse control; D preposition
0~4
─
0
F_154
P Selection
0: P postposition 1: P preposition
0,1
─
1
F_155 Proportional Gain(P) Set the gain for deviation adjustment.(0.0: disabled) 0.0~25.0
0.1
1.0
F_156 Integration Time(I)
Set the integration time for deviation adjustment.
(0.0: disabled)
0.0~100.0 0.1sec
2.0
F_157 Derivative Time(D)
Set the derivative time for deviation adjustment.
(0.00: disabled)
0.00~2.50
0.01
sec
0.00
F_158
Derivative Time of
Feedback
Set the derivative time for feedback signal.
0.00~2.50
0.01
sec
0.00
F_159
Integration Upper
Limitation
Set the upper limitation value of the integration.
(1.00= maximum output frequency)
0.00~1.00 0.01
1.00
F_160
Integration Lower
Limitation
Set the lower limitation value of the integration.
(1.00= maximum output frequency)
-1.00~
1.00
0.01
0.00
F_161
Integrator Initialized
Value
Set the initial value of the integration before PID
starts. (1.00= maximum output frequency)
-1.00~
1.00
0.01
0.00
F_162 PID Buffer Space Set the buffer space of PID output value.
0~255
─
2
F_163
Feedback Signal
Filter
Filter the feedback signal.
0~255
─
10
F_164
Feedback Signal
Trip Detection
0: Disable
1: Enable (at F_126=0)
0,1
─
1







































































