





























FIRST Global Building Guide Created by REV Robotics 2019, Licensed Under CC BY-SA
30
3.11.2
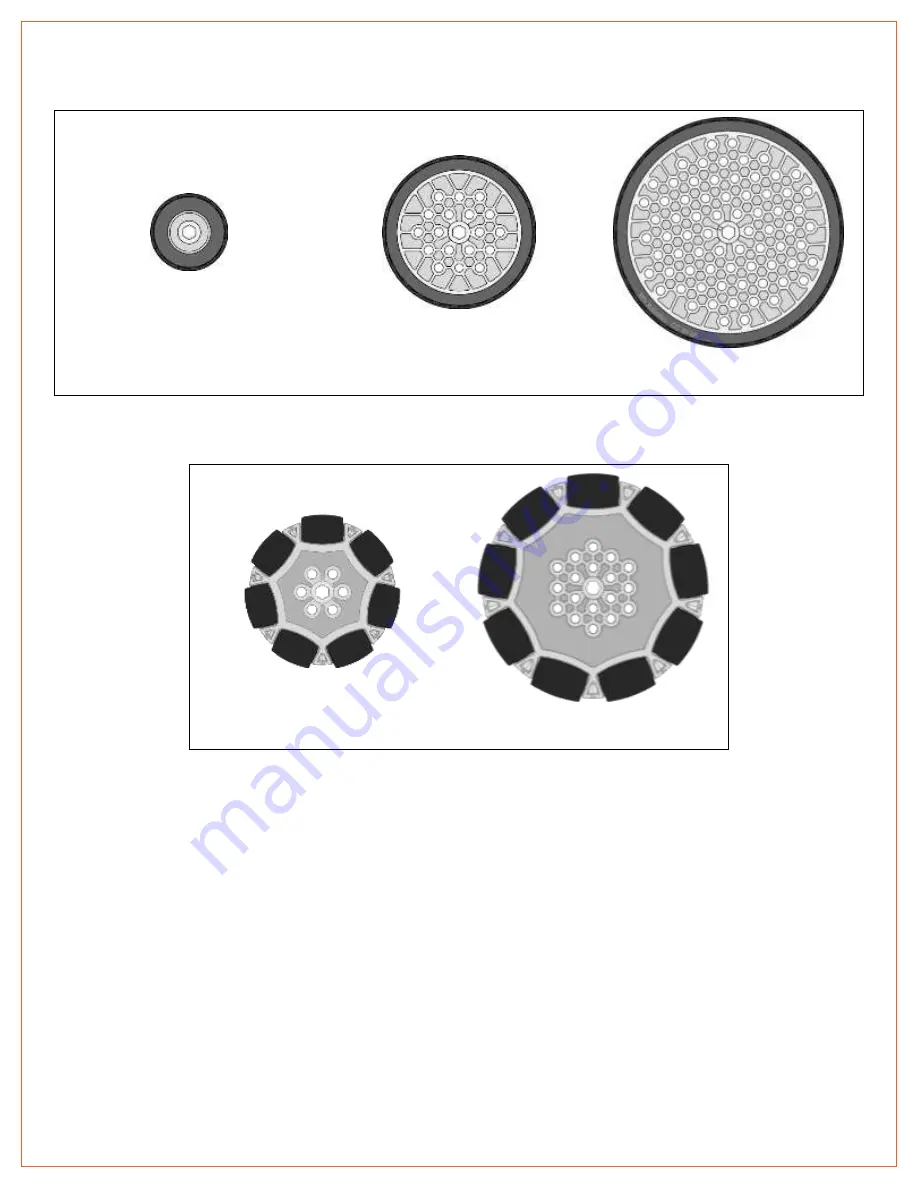
All Wheels
Table 7: Traction Wheels
30mm Traction Wheel
REV-41-1353
60mm Traction Wheel
REV-41-1350
90mm Traction Wheel
REV-41-1354
Table 8: Omni Wheels
60mm Omni Wheel
REV-41-1353
90mm Omni Wheel
REV-41-1354
Содержание FIRST Global
Страница 26: ...FIRST Global Building Guide Created by REV Robotics 2019 Licensed Under CC BY SA 24 Figure 40 M3 Drop in Bolt...
Страница 45: ...FIRST Global Building Guide Created by REV Robotics 2019 Licensed Under CC BY SA 43 GEARS 1 1 Scale...
Страница 46: ...FIRST Global Building Guide Created by REV Robotics 2019 Licensed Under CC BY SA 44 SPROCKETS 1 1 Scale...
Страница 47: ...FIRST Global Building Guide Created by REV Robotics 2019 Licensed Under CC BY SA 45 WHEELS 1 1 Scale...
Страница 49: ...FIRST Global Building Guide Created by REV Robotics 2019 Licensed Under CC BY SA 47 BRACKETS 1 1 Scale...
Страница 50: ...FIRST Global Building Guide Created by REV Robotics 2019 Licensed Under CC BY SA 48...







































































