





























Chapter 2: Commissioning
27
Aligning the compass heading
1. Once the deviation is displayed, press
disp
to move to the Heading Align
ment page (
ALIGN HDG
).
2. Manually steer the boat on a steady course at a speed which enables you to
hold that course.
3. If you have a GPS connected to your SmartPilot:
• increase the boat speed to more than 3 knots
• press
auto
: the SmartPilot will then set the heading to agree with the
COG (course over ground) heading received from the GPS
• as many factors can cause a difference between heading and COG (such
as tides and leeway affecting the boat) you must then finetune the head
ing alignment so it matches the boat’s steering compass or a known tran
sit bearing
4. Use
1, +1, 10
and
+10
keys to adjust the displayed heading until it matches
boat’s steering compass or a known transit bearing.
5. Press and hold
standby
for 2 seconds to exit Seatrial Calibration and save
the new compass settings.
2 sec
D9329-1
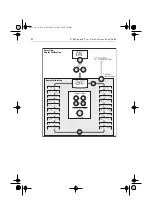
Align the autopilot heading
a
b
Save changes
To:
• save deviation correction
• save heading alignment
• return to STANDBY mode
Autopilot heading
Steering compass
=
Known
heading
or
or
Adjust the autopilot heading so it shows the
same value as the boat's steering compass
Coarse adjustment:
If COG is available from GPS, press to set autopilot heading to
COG value, then fine tune manually (see below).
Fine adjustment:
If COG is not available (or after setting heading to COG),
align autopilot heading manually:
81282_1.book Page 27 Monday, October 2, 2006 1:58 PM
Содержание SmartPilot S1 Tiller Pilot
Страница 28: ...16 S1 Wheel and Tiller Pilots Commissioning Guide 81282_1 book Page 16 Monday October 2 2006 1 58 PM ...
Страница 70: ...58 S1 Wheel and Tiller Pilots Commissioning Guide 81282_1 book Page 58 Monday October 2 2006 1 58 PM ...
Страница 74: ...62 S1 Wheel and Tiller Pilots Commissioning Guide 81282_1 book Page 62 Monday October 2 2006 1 58 PM ...