














Содержание SmartPilot S1 Tiller Pilot
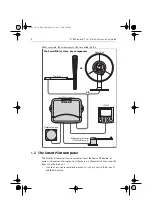
Страница 28: ...16 S1 Wheel and Tiller Pilots Commissioning Guide 81282_1 book Page 16 Monday October 2 2006 1 58 PM ...
Страница 70: ...58 S1 Wheel and Tiller Pilots Commissioning Guide 81282_1 book Page 58 Monday October 2 2006 1 58 PM ...
Страница 74: ...62 S1 Wheel and Tiller Pilots Commissioning Guide 81282_1 book Page 62 Monday October 2 2006 1 58 PM ...







































































