

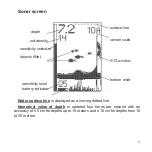

























In the above figure, a scale of 5M is selected with a bottom depth of 2.36 m.
Flasher
Flasher mode is designed to monitor objects in real
time. This mode will be ineffective at shallow depths
(2-3 meters), but working in deep water will allow to
observe real pictures of the bait movement and, most
importantly, the fish’s reaction to these actions.
In Flasher mode, the screen is divided into two equal
parts. On the left is the “history” window, which
displays unprocessed signals (like in Pro mode),
observed by the sonar. The Flasher is on the other half
of the screen: each time the screen is refreshed (4
times per second), it draws wide strips of marks of all
detected objects, including the bottom. Next to the
mark about the largest detected object, its depth is
displayed. The figure below shows how the position of
the balancer, which is currently at a depth of 3.4
meters, has changed.
The largest object is not digitized over its entire depth, but only starting from
1.5 meters from the surface or the deaf zone value. This measure was taken
to reduce the influence of near-surface signals.
Due to the large bandwidth, signal marks are more noticeable than regular
echoes in Pro modes, and the increased sampling frequency allows to display
information nearly in real time.
18







































































