





























NFO
Drives
AB
2021
201013
‐
2
Operating
and
Installation
Manual
21
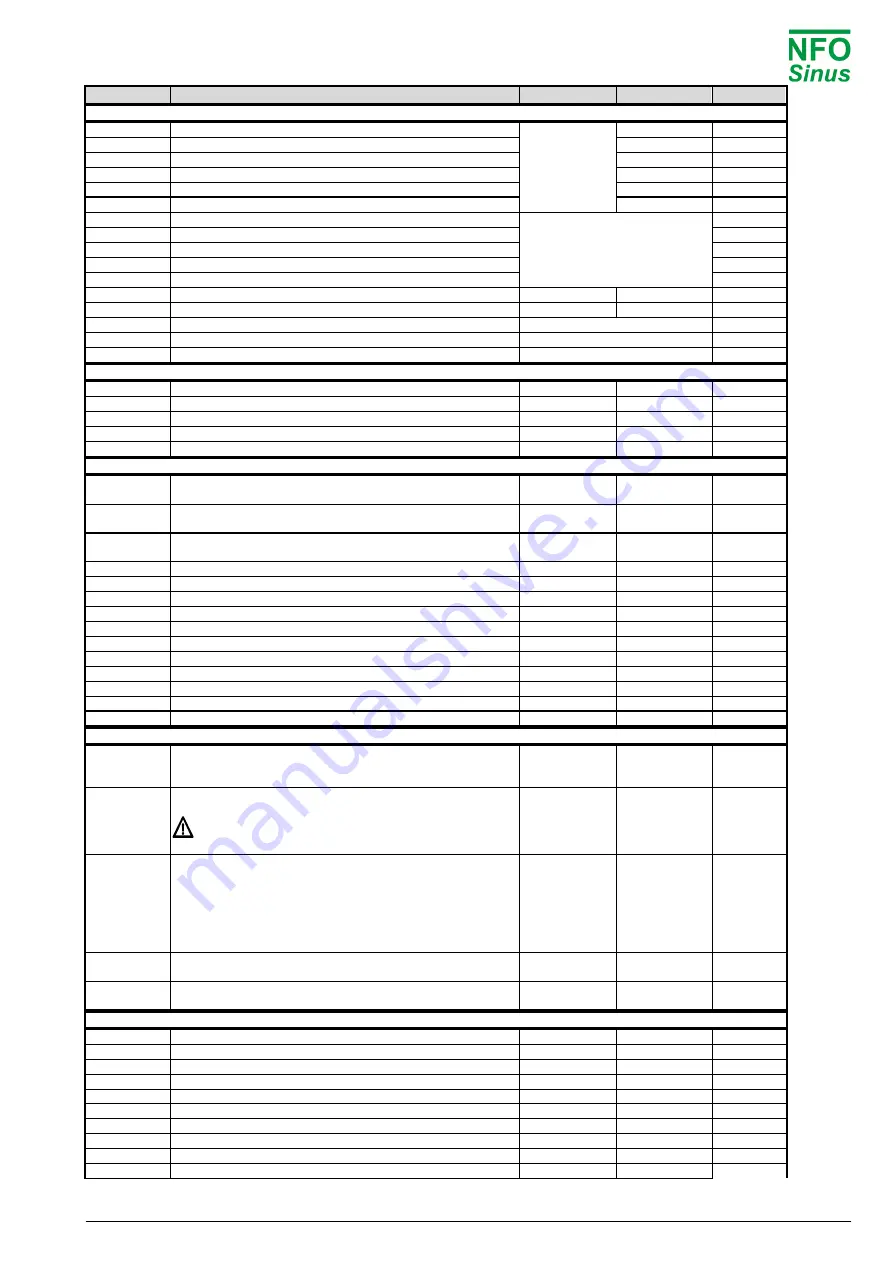
Name
Description
Default value
Range
Type
[1]
Motor
P-Nom
Nominal motor power
Table 11
0.18 – 5,5 kW
Standby
U-Nom
Nominal motor voltage
120 – 690 V
Standby
f-Nom
Nominal motor frequency
25 – 150 Hz
Standby
N-Nom
Nominal motor speed
300 – 3000 rpm
Standby
I-Nom
Nominal motor current
Table 11
Standby
cos
Nominal motor cos
0.5 – 1.0
Standby
Tuning Tuning
command
Measured during tuning
Standby
R-stator Motor
stator
resistance
Standby
R-rotor
Motor rotor resistance
Standby
L-main
Motor main inductance
Standby
Sigma
Motor leak inductance
Standby
I-Magn
Magnetisation current setpoint (RMS)
0,1 – Imax [A]
Standby
I-Limit
Maximum motor current (RMS)
0,5 – Imax [A]
Standby
Pole Count Number of poles, calculated from f-Nom and N-Nom
Read
T-nom
Nominal torque, calculated from N-Nom and I-Nom
Read
Tuned status Status of most recent tuning command
Read
Ramp
Acceleration Acceleration time from 0 to f-Nom Hz
15.0 s
[2]
0.5 - 100.0 s
Stby/Run
Deceleration Deceleration time from f-Nom to 0 Hz
15.0 s
[2]
0.5 - 100.0 s
Stby/Run
Breakpoint Breakpoint for alternate Accel/Decel
0.0 Hz
0 - 50.0 Hz
Stby/Run
Alt. Accel
Alternate Acceleration time from 0 to f-Nom Hz
15.0 s
[2]
0.5 - 100.0 s
Stby/Run
Alt. Decel
Alternate Deceleration time from f-Nom to 0 Hz
15.0 s
[2]
0.5 - 100.0 s
Stby/Run
Run
Phase Order Controls default direction of rotation
U–V–W
U–V–W
U–W–V
Standby
Stop Mode
Brake
= motor brakes according to
Deceleration Ramp
Release
= motor is released.
Brake
Brake
Release
Stby/Run
Energy Save
OFF
= Function is disabled.
ON
= Inverter optimizing energy consumption of the motor
OFF
OFF
ON
Stby/Run
Pwr On Delay Delay from when power is applied until motor can start
4 s
4 – 10 s
Stby/Run
Run Delay Delay from Run signal detected to actual start
0.0 s
0.0 – 10.0 s
Stby/Run
Stop Delay Delay from motor has stopped until new Run signal is accepted
0.0 s
0.0 – 10.0 s
Stby/Run
DC Brake
Time in seconds for motor DC braking before start
0 s
0 – 10 s
Stby/Run
Kp-speed
Amplifier component speed regulator 2,0
[2]
0,2
– 10,0
Stby/Run
Ti-speed
Integrator component speed regulator 0,5
[2]
0,2
– 10,0 s
Stby/Run
Sleep Freq Sleep frequency setting
0.0 Hz
0.0 – 50.0 Hz
Stby/Run
Bypass Freq Bypass frequency
0.0 Hz
0.0 – 50.0 Hz
Stby/Run
Bypass BW Bypass frequency bandwidth
0.0 Hz
0.0 – 50.0 Hz
Stby/Run
Iboost Time Current boost time, from start
5 s
0 – 100 s
Stby/Run
Iboost Level Current boost level
50%
0 – 100%
Stby/Run
Control
Control Mode
Frequency
= speed control with frequency estimation
Speed
= speed control with rpm estimation
PI-Reg
= process regulator
Frequency
Frequency
Speed
PI-Reg
Standby
Autostart
OFF
= Inverter awaits transition on RUN after power applied.
ON
= motor starts as soon as power is applied if RUN is active.
WARNING: If Autostart=ON and RUN signal active, the
inverter will start when power is applied.
OFF
OFF
ON
Stby/Run
Analog in 1
setpoint type
Type of input used for analog setpoint.
0-10V
0-20mA
4-20mA
+/-20mA
0-10V
2-10V
+/-10V
Pot
Stby/Run
Analog in 2
setpoint type
Same as Analog in 1 setpoint type. 0-10V
see
above
Stby/Run
Digital input
config
Pre-set configurations of digital inputs
Default
Default
OEM1
Stby/Run
Frequency
Op mode
Setpoint source, frequency
Terminal Table
12
Stby/Run
Fix Frq 1
Fixed frequency 1
10.0 Hz
0.0-150.0 Hz
Stby/Run
Fix Frq 2
Fixed frequency 2
20.0 Hz
0.0-150.0 Hz
Stby/Run
Fix Frq 3
Fixed frequency 3
30.0 Hz
0.0-150.0 Hz
Stby/Run
Fix Frq 4
Fixed frequency 4
40.0 Hz
0.0-150.0 Hz
Stby/Run
Fix Frq 5
Fixed frequency 5
50.0 Hz
0.0-150.0 Hz
Stby/Run
Fix Frq 6
Fixed frequency 6
60.0 Hz
0.0-150.0 Hz
Stby/Run
Fix Frq 7
Fixed frequency 7
70.0 Hz
0.0-150.0 Hz
Stby/Run
Min Ain Frq Lowest frequency when running with analogue setpoint.
10.0 Hz
+/-
150.0 Hz
Stby/Run
Max Ain Frq Highest frequency when running with analogue setpoint.
50.0 Hz
+/-
150.0 Hz
Stby/Run
3006469-2022-04







































































