



























CHAPTER 3. GENERAL HARDWARE INFORMATION
3.6. SAFETY INSTRUCTIONS
3.6.5 Bringing into Service
After installing the mobile robot and also after making changes to the environment or the work processes a supervised
test-run has to be performed. This test has to cover all possible steps of the process. Autonomous operation must not
be resumed without a successful test-run.
This also applies to modifications of routes and target positions, parameters, environmental conditions and higher level
control systems.
Repairs, maintenance work and other changes in the system’s hardware should also be followed by a test-run.
Note:
The Neobotix GmbH cannot be held responsible in any way for injuries or damages which are caused by any
problem that could have been detected or prevented by a supervised test-run.
3.6.6 Modification of the System
If you intend to perform any kind of mechanical, electrical or software modification and feel unsure about the process,
please contact Neobotix. Some detailed information or instruction might be necessary.
In case one or more robots are to be modified, it is strongly recommended to consult Neobotix in order to provide the
appropriate training and information for all technicians and programmers. The functions and safety of all modified
robots have to be checked and ensured before bringing them into service.
Attention:
All warranties are void in case of any unauthorised or improper modification of the mobile robot
system. All responsibilities for the further operation of the robot are devolved to whoever commands or executes
such modifications.
3.6.7 Expected Misuse
3.6.7.1 Passenger Transportation
Danger:
Transporting passengers on or by the mobile robot is dangerous and strictly prohibited. The Neobotix
GmbH cannot be held responsible for any injuries and / or damages caused to or by transporting passengers with
the mobile robot.
3.6.7.2 Safety Fields
The laser scanners’ safety fields must be configured and tested by the operator prior to taking the robot into service.
If more than one safety field are to be used they need to be dynamically activated according to the current state and
intended action of the robot.
Warning:
The operator takes full responsibility for the safe activation of the safety fields. Safety fields that are
set up incorrectly or have been activated faultily will result in an unsafe and possibly dangerous operation of the
mobile robot.
35
Содержание MMO-700
Страница 1: ...MMO 700 Neobotix GmbH Apr 14 2022 ...
Страница 11: ...CHAPTER 1 MMO 700 1 6 TRANSPORT Fig 3 Position of the auxiliary batteries and battery connectors 7 ...
Страница 33: ...CHAPTER 3 GENERAL HARDWARE INFORMATION 3 4 CHARGING STATIONS Fig 2 Position of the main power switch X 29 ...
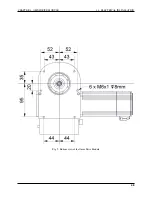
Страница 52: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 1 Dimensions of the Omni Drive Module 48 ...
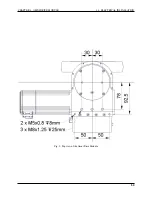
Страница 53: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 2 Bottom view of the Omni Drive Module 49 ...
Страница 54: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 3 Top view of the Omni Drive Module 50 ...







































































