




























CHAPTER 4. OMNI DRIVE MODULE
4.1. PRODUCT DESCRIPTION
are the following:
4.1.2.1 1 Omni-Drive-Module with 2 fixed rollers
This configuration is the cheapest and easiest to control. Although possible, it is very rare that the Omni-Drive-Module
is moved in a way that will make the fixed wheels jam.
In this configuration, true omnidirectional motion is not possible since the vehicle will always follow the drive unit.
4.1.2.2 3 Omni-Drive-Modules
This configuration ensures high stability for smaller robots, avoids static indeterminacy and allows fully omnidirec-
tional movement.
All three wheels must be aligned correctly at all times to avoid jamming or slippage. Please mind that the angle
between the wheels must change according to the movement’s centre of rotation.
4.1.2.3 4 Omni-Drive-Modules
This configuration is most commonly used for service robots. It guarantees highest stability even for big and heavy
robots. Although it is statically indeterminate this will not cause problems in most applications because all wheels are
aligned actively.
44
Содержание MMO-700
Страница 1: ...MMO 700 Neobotix GmbH Apr 14 2022 ...
Страница 11: ...CHAPTER 1 MMO 700 1 6 TRANSPORT Fig 3 Position of the auxiliary batteries and battery connectors 7 ...
Страница 33: ...CHAPTER 3 GENERAL HARDWARE INFORMATION 3 4 CHARGING STATIONS Fig 2 Position of the main power switch X 29 ...
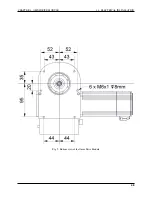
Страница 52: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 1 Dimensions of the Omni Drive Module 48 ...
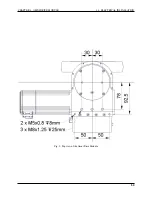
Страница 53: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 2 Bottom view of the Omni Drive Module 49 ...
Страница 54: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 3 Top view of the Omni Drive Module 50 ...