114 | ni.com | NI DIDS-2100 Series User Manual
EPT N-M 7 (max)
120
4
7
30720
0.023
EPT N-M 7 (min)
12
4
7
3072
0.234
EPT N+1 9 (max)
24
4
9
24576
0.029
EPT N+1 9 (min)
4
4
9
4096
0.176
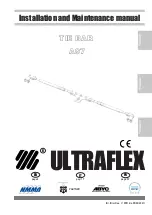
Table 4.6.b, EPT function Extrapolation Values and Suggestion Tooth Count Ranges
Loss of Sync
The EPT will lose sync under normal conditions if the crankshaft speed falls below the stall speed, as specified by
the
parameter of the EPT tab. Keep in mind that the EPT function uses a 24-bit, 40MHz timer to measure
the period between each physical tooth. Therefore, a
should be specified such that the tooth period timer
will not exceed 24-bit representation. This is a straight-forward calculation for encoder patterns. For example, if a
180-count encoder were used on the crankshaft, and it is desired to have a
tooth period timer for that speed (266666) must be checked so that it does not exceed a 24-bit value (2^24). It does
not, so a
of 50 RPM is acceptable. When EPT N-M 7 function is selected, extra attention must be given
to the
parameter. For example, if a 60-2 crank pattern is used, then there is a two-tooth gap, which
means that the timer period during the gap will be three times the period between the other evenly spaced teeth.
of 50 RPM correlates to an evenly spaced tooth period of 20 milliseconds. Therefore,
the period during the gap would be 60 milliseconds at 50 RPM. Sixty milliseconds correspond to a 40 MHz timer
value of 2400000, which can be represented by a 24-bit value. Therefore, a 50 RPM
this example.
The EPT function will lose sync in error when missing or extra crank/cam pulses are encountered where unexpected.
In all conditions, when sync is lost,
will be set to “Stopped”. A loss
of sync due to an error condition will be further signaled by the appropriate pattern-specific error flag on the EPT
tab. An error condition causing loss of sync will prevent any further sync until the error flag is cleared using the
button on the EPT tab. An obvious possible reason for such errors would be that the crank or cam
trigger wheel pattern does not match the configuration of the selected EPT function. If this is the case, the EPT will
either not sync at all or will lose sync almost immediately after initial sync. Assuming that the trigger wheel pattern is
correct, there is another common source of sync errors, which is electrical noise. This problem is discussed below,
along with some diagnostic techniques.
Electrical Noise
Electrical noise can be picked up and manifested in a wide variety of ways. There are a few guidelines that should
be followed for ensuring appropriate immunization against electrical noise. It is unlikely that noise will be introduced
on the crank or cam signals between the NI 9411 module and the cRIO controller. It is most likely that electrical noise
will be picked up along the wires between the sensor and the external connection to the NI 9411 module. If possible,
the wiring for sensors should be twisted shielded pairs and as short as possible. There should be few electrical
connections between the sensor and the module. The signals should be routed away, if possible, from high-current
wires such as injector wires or dynamometer wiring. The NI 9411 module should have a sensor signal ground
connected to its COM pin. Efforts should be made to fully understand all ground connections within the system,
making sure that ground connections are made in a “star” fashion instead of daisy-chain. Daisy-chain grounding can
lead to problematic ground loops where sensors and actuators use signal ground reference wires as a return path
for current back to ground. The wire used for NI 9411 COM ground reference should not be considered as a power
ground return path. If noise spikes are still causing false triggering of the digital input circuit, digital filtering may be
implemented within the DI Driver System using the integrated digital filter function. The digital filter rejects signal
pulses up to a specified width. The filter times are specified via the
window. It is common to use
a filter time of 1 to 5 microseconds. If filter times higher than 10 microseconds are required, then it is likely that noise
problems can be resolved in the external wiring.
Содержание NI DIDS-2103
Страница 11: ...NI DIDS 2100 Series User Manual National Instruments 11 3 2 Software...
Страница 32: ...32 ni com NI DIDS 2100 Series User Manual...
Страница 40: ...40 ni com NI DIDS 2100 Series User Manual 3 3 Hardware...
Страница 44: ...44 ni com NI DIDS 2100 Series User Manual 3 3 3 Connecting Injectors Sensors and Actuators...
Страница 174: ...174 ni com NI DIDS 2100 Series User Manual Aux PWX 2 4 See above descriptions...
Страница 208: ...208 ni com NI DIDS 2100 Series User Manual 10 Connecting Solenoid Direct Injectors to the DI Driver...
Страница 209: ...NI DIDS 2100 Series User Manual National Instruments 209 11 Connecting Piezo Direct Injectors to the DI Driver...
Страница 210: ...210 ni com NI DIDS 2100 Series User Manual 12 Connecting Port Fuel Injectors to the PFI Driver...
Страница 212: ...212 ni com NI DIDS 2100 Series User Manual 14 Connecting General Purpose Solenoids to the PFI Driver LS Channels...
Страница 213: ...NI DIDS 2100 Series User Manual National Instruments 213 15 NI 9411 to Single Ended and Differential Encoder...
Страница 214: ...214 ni com NI DIDS 2100 Series User Manual 16 9066 RS 232 Serial Connector to TDK Power Supply...
Страница 216: ...216 ni com NI DIDS 2100 Series User Manual 8 Important Information...
Страница 223: ...NI DIDS 2100 Series User Manual National Instruments 223...