





























MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
113
7 Control
speed range, however, this feed forward control with its finite resolution no longer
provides an advantage: the detent torque compensation is eliminated linearly via the
fade function (ramp).
In a broader sense, detent torque compensation can always be used when a
disturbance torque occurs ‘regularly’ as a function of the position.
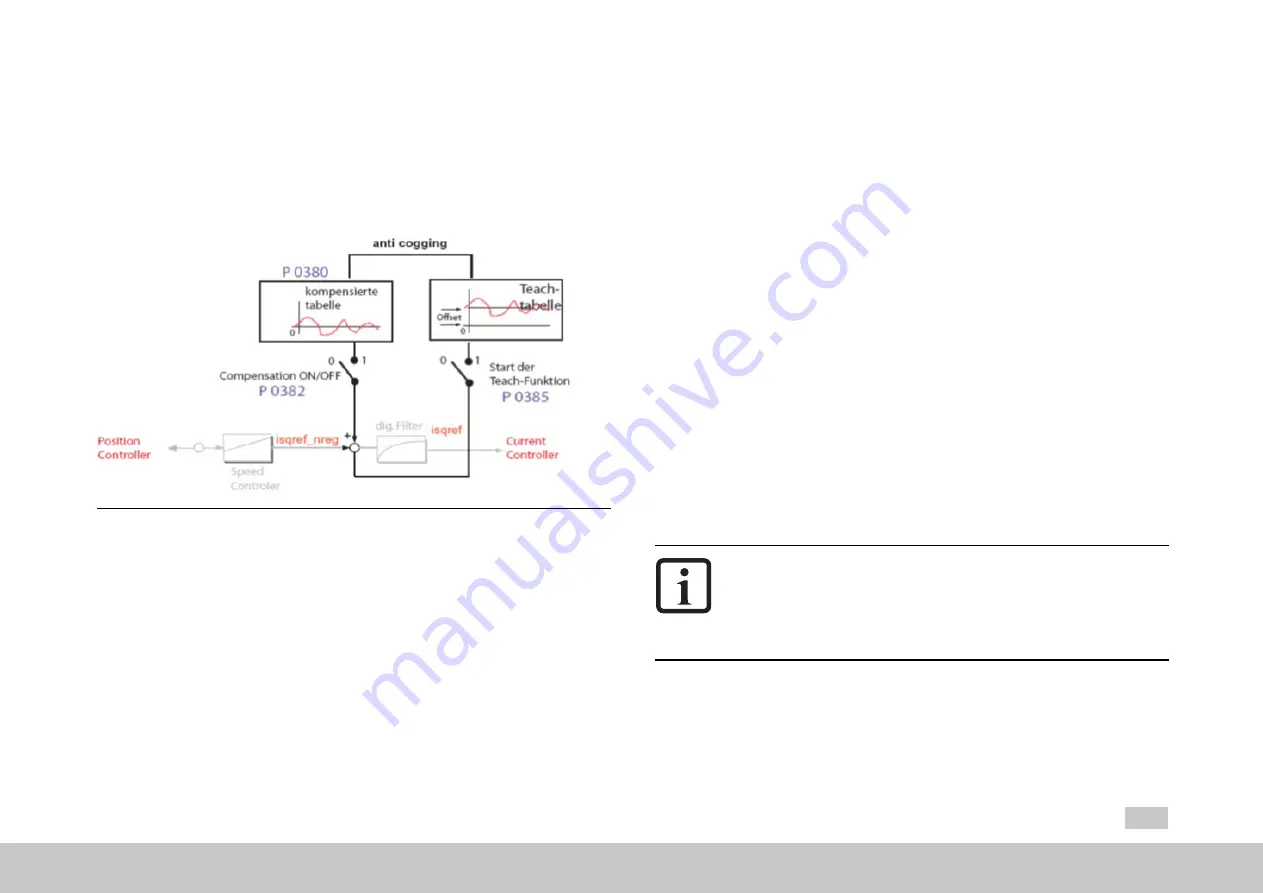
Fig. 7.10: Detent torque compensation schematic
The parameter P 385[0] - CON_TCoggTeachCon selects the position source for the
teaching and sets the teach modes (including: rotary or absolute): the teaching is
activated and the compensation is deactivated. With ‘start control’ in the speed
control mode, the teaching (teaching routine) begins with a slow run: e.g. <= 1 rpm
(at least one revolution of ‘learning’ travel).
With the control still operating (and a slow run), the teaching is then stopped by
calling the calculation function once: with P 385[0] - CON_
TCoggTeachCon=CALC1(3) or with P 385[0] - CON_TCoggTeach- Con = CALC2
(8).It ‘calculates’ the corresponding compensation table (which can be saved) from
the teach table (which cannot be saved): the compensation table is filled in
immediately and is ready for the compensation. After the ‘calculation' is complete,
the parameter P 385[0] automatically jumps back to P 385[0] - CON_
TCoggTeachCon = READY(0). The teaching and calculation are thus finished. The
position source used by the teaching has been stored internally. Now the control
system can (should) be stopped. The compensation table still needs to be saved,
e.g. using the DM5 button “Save setting non volatile inside device” (= persistently).
The position source used by the teaching is also saved. It will later be used for the
compensation once again in exactly the same manner.
The compensation (feed forward control) can now be activated using: P 382[0] -
CON_TCoggComp > 0.
Caution: Of course, not every compensation parametrization fits with every previous
teaching parametrization.
The input and output variables can be observed via scope signals during the
teaching routine and the compensation. The signal 156_eps_comp. here gives the
current raw input position (source) both during the teaching routine and later during
the compensation. The signal 157_eps_comp.tune gives the current input position
including the input tuning (only for the functions 1). The table index and the table
output can both be accessed via the scope signals 440_CON_TAB_TabIdx and
446_CON_TAB_OutVal.
NOTE
On firmware V123.60-98 and higher, the detent torque
compensation function can be used for all control modes. In older
versions, this compensation is implemented exclusively for speed
and position control.
Содержание MSD Servo Drive Series
Страница 3: ...MOOG ID No CB40859 001 Date 02 2018 MSD Servo Drive Device Help 3 Change history...
Страница 4: ...MOOG ID No CB40859 001 Date 02 2018 MSD Servo Drive Device Help 4 Change history...
Страница 14: ...MOOG ID No CB40859 001 Date 02 2018 MSD Servo Drive Device Help 14 1 General information...