





























Moog ACV with CANopen bus interface
7 Servo valve functions
Monitoring
B99224-DV018-D-211, Rev. A, October 2018
241
7.15.5 Failsafe monitoring
This monitoring is used to monitor the so called "failsafe position" that means the spring centered spool posi-
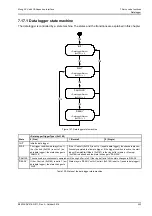
tion. The control window is defined by an <UpperLimit> (0x2421) and a <LowerLimit> (0x2422), which are set
by the factory. If the failsafe spool position monitoring function is enabled by setting the parameter
<DigitalOutputType1> (0x2420) to 1 (failsafe spool position monitoring on), the servo valve monitors the fail-
safe position of the spool position <ActualValue> (0x6301) and sets the digital output 1.
Chapter "6.8.2 Object 0x5E41: Digital output configuration", page 101
Figure 145: Failsafe monitoring
Electrical signal
Failsafe spool position monitoring behavior depending on the DSM state <StatusWord> (0x6041)
WARNING
Moving machine parts!
The word "failsafe" does not mean personnel safe hydraulic motion control system.
If personnel safety needs to be guaranteed, additional electrical and hydraulic components are
necessary!
<UpperLimit>
(0x2421)
t
<SplActualValue>
(0x6301)
<UpperLimit>
(0x2421)
<LowerLimit>
(0x2422)
Digital output 1 = 0 V
<LowerLimit>
(0x2422)
Spool position
failsafe
monitoring
<SplActualValue>
(0x6301)
Digital output 1
<DigitalOutputType1>
(0x2420)
Digital output 1 = 0 V
Digital output 1 = 24 V
Digital output 1 = 24 V
Spool position <SplActualValue> (0x6301)
Electrical signal (negative logic)
Actual spool position value is within the failsafe
monitoring window
Digital output 1 = 24 V
Actual spool position value is outside the failsafe
monitoring window
Digital output 1 = 0 V