





























Chapter 3 Before positioning
3- 12
• If linear interpolation is executed, main axis is determined according to moving amount of X and
Y axis. In table 3-7, since moving amount of X axis is larger than Y, X axis becomes main axis.
• So subsidiary Y axis operation pattern, operation speed, ACC/DEC time, dwell time do not
affect the operation and recalculated according to operation data of main axis. For example, if
you execute the linear interpolation control with operation data such as table 3-7, subsidiary Y
axis starts as END, SINGLE operation and operates with automatically calculated ACC/DEC
speed and operation speed, as for Dwell time after stop, 100ms, dwell time of main axis X is
applied. not 20ms, setting value.
Remark
• A special attention should be paid that linear interpolation start operates on 2 axes
simultaneously.
• Pattern of main axis can specified as ‘END’, ‘KEEP’. If it is specified as ‘CONT’, object
moves as it is ‘KEEP’.
• Available commands during linear interpolation are DEC. STOP, EMG. STOP.
• During linear interpolation operation, position/speed switching control, speed override,
position override, speed override with position, If those are executed during liner
interpolation operation, it may cause error.
• Operation method, operation pattern, speed limit, dwell time is specified as that of main axis.
• Speed, acceleration/deceleration time, bias speed of subsidiary axis is calculated again
automatically.
• Backlash compensation amount, SW upper/lower limit is specified as it is for each axis.
3.1.7
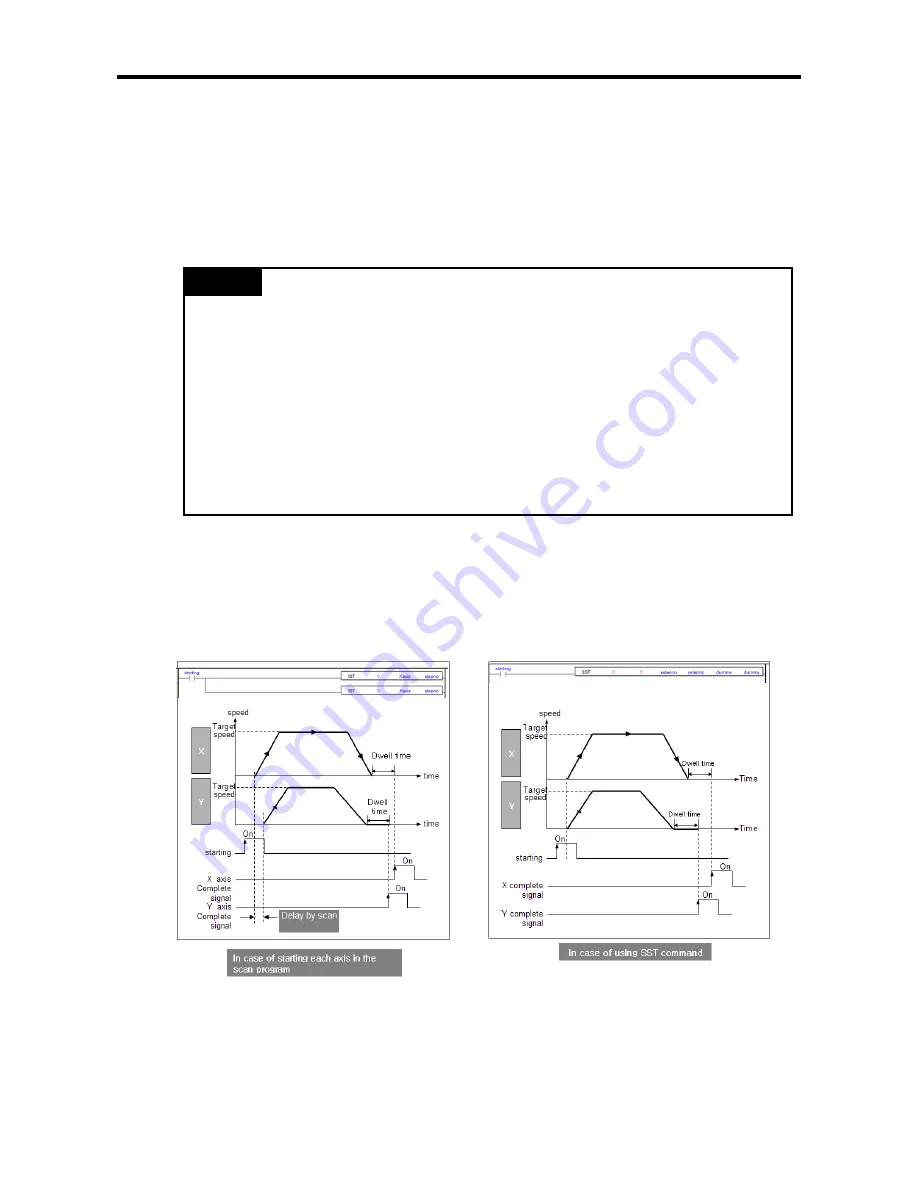
Concurrent start control
• It starts each step for each axis concurrently by concurrent start control (SST instruction).
• If SST instruction is used, it can remove delay of start caused by scan time delay.
• SST instruction can be executed when two axes stop. If SST instruction is executed again after stop,
in case of incremental coordinates, the current position is initialized as 0.
Содержание XBC-DN20S
Страница 210: ...Chapter 7 Program Examples of Positioning 7 6 2 XEC ...
Страница 215: ...Chapter 7 Program Examples of Positioning 7 11 2 XEC ...
Страница 220: ...Chapter 7 Program Examples of Positioning 7 16 2 XEC ...
Страница 225: ...Chapter 7 Program Examples of Positioning 7 21 2 XEC ...
Страница 232: ...Chapter 7 Program Examples of Positioning 7 28 2 XEC ...
Страница 237: ...Chapter 7 Program Examples of Positioning 7 33 2 XEC ...
Страница 240: ...Chapter 7 Program Examples of Positioning 7 36 ...
Страница 308: ...Appendix 4 Dimension App 4 3 3 High end type main unit XBC DN32H XEC DN32H XEC DP32H XBC DR32H XEC DR32H ...
Страница 309: ...Appendix 4 Dimension App 4 4 XBC DN64H XEC DN64H XEC DP64H XBC DR64H XEC DR64H ...
Страница 311: ...Appendix 4 Dimension App 4 6 XBE DC08A XBE DC16A XBE TN08A XBE TN16A XBE DR16A XBE RY08A ...
Страница 312: ...Appendix 4 Dimension App 4 7 5 Communication module XBL C41 21A XBL EMTA ...
Страница 313: ...Appendix 4 Dimension App 4 8 5 Special module XBF AD04A XBF DV04A ...