





























KFU 2-/4-
201
16.4
Functions of Sensorless Control
The configurations of the sensorless control contain the following additional functions,
which supplement the behavior according to the parameterized V/f characteristic.
16.4.1 Slip
compensation
The load-dependent difference between the reference speed and the actual speed of
the 3-phase motor is referred to as the slip. This dependency can be compensated by
the current measurement in the output phases of the frequency inverter.
The activation of
Operation mode
660
for the slip compensation enables as speed
control without feedback. The stator frequency and speed are corrected depending
on the load.
Before the slip compensation can be activated, the guided commissioning has to be
carried out. The
Stator resistance
377
is required to ensure a correct function and is
measured during the guided commissioning.
Operation mode
660
Function
0
-
Off
The slip compensation is deactivated.
1
-
On
The load-dependent slip speed is compensated.
The control behavior of the slip compensation can only be optimized via the parame-
ters in the case of specific applications. The parameter
Amplification
661
determines
the correction of the speed and the effect of the slip compensation proportionally to
the change of load. The
Max. slip ramp
662
defines the max. frequency change per
second in order to avoid an overload in the case of a load change.
The parameter
Minimum frequency
663
determines the frequency as from which the
slip compensation becomes active.
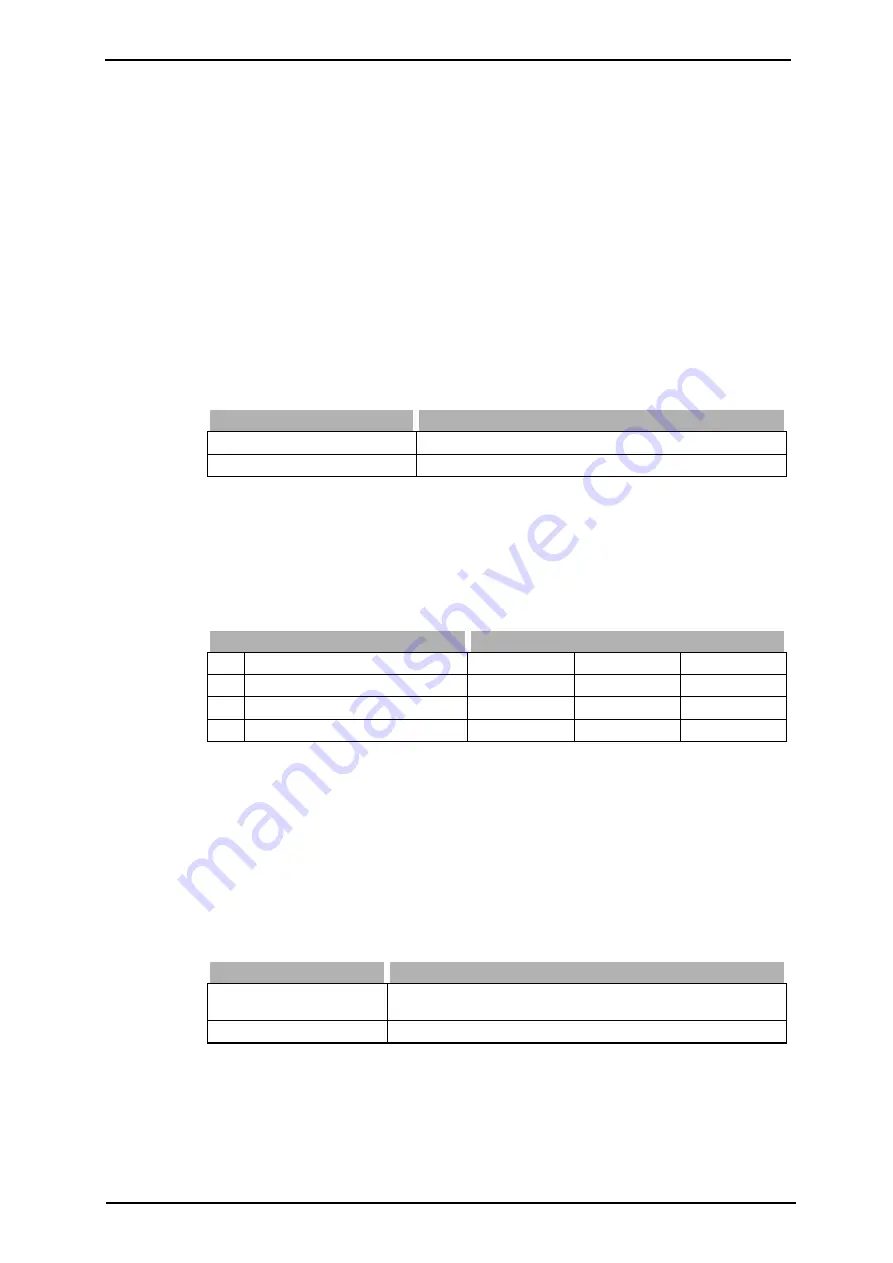
Parameter
Settings
No.
Description
Min.
Max.
Fact. sett.
661
Amplification
0.0 %
300.0 %
100.0 %
662
Max. Slip Ramp
0.01
Hz/s 650.00
Hz/s 5.00
Hz/s
663
Minimum Frequency
0.01 Hz
999.99 Hz
0.01 Hz
16.4.2 Current limit value controller
Via a load-dependent speed control, the current limit value controller ensures that the
drive system is not overloaded. This is extended by the intelligent current limits de-
scribed in the previous chapter. The current limit value controller reduces the load on
the drive, e.g. during acceleration, by stopping the acceleration ramp. The switch-off
of the frequency inverter which happens when the acceleration ramps have been set
at an excessive gradient is prevented in this way.
The current limit value controller is switched on and off via parameter
Operation
mode
610.
Operation mode
610
Function
0
-
Off
The current limit value controller functions and the intelli-
gent current limits have been deactivated.
1
-
On
The current limit value controller is active.





















































