


























Encoder interfaces | 8
ma_dr_f6-cu-p-inst-20182705_en
35
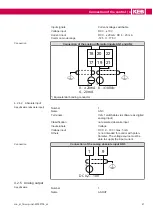
8.3 Input signals
360° mechanically/
increments per revolution
1Vss
(typically
)
1Vss
(typically
)
1Vss
(typically
)
1Vss
(typically
)
0.2 ...
1.2Vss
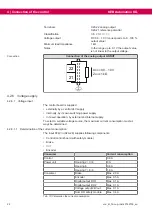
360° mechanically =
360° electronically
Cos(+) - Cos(-)
Sin(+) - Sin(-)
S) -
Sin_abs(-)
C) -
Cos_abs(-)
N(+) - N(-)
0° mechanically
digtal Position of
e.g. EnDat or
Hiperface
Abb. 6:
Assignment of the input signals (as difference signals)
a) For rectangular incremental signals, the characteristic of the signal corres-
ponds to A -> COS and B-> SIN.
b) The identification "C" and "D" for the absolute signals must be checked. Fre-
quently signal C corresponds to -> SIN_abs and D to -> (inverted)COS_abs.
Thus D+ is at COS_abs- and D- is at .







































































