

























55
Note: This parameter is only valid for advanced V/F.
04.16
Self-learning of motor parameters
0
~
1
0
0: invalid
1: Static self-learning (STAR is displayed immediately when it is started. After finished, END is displayed and disappears after 1s
04.17
Motor rated Power
0.0
~
2000.0KW
Model setting
04.18
Rotor resistance of motor
0.00
~
200.00Ω
Model setting
04.19
Inductance of stator and rotor of motor
0.00
~
200.00mH
Model setting
04.20
Mutual inductance between stator and rotor of motor
0.00
~
200.00mH
Model setting
After the rated power of the motor is changed to 04.17, 04.01, 04.02, 04.04, 04.05, 04.18
~
04.20 are automatically updated as the default parameters of the
motor with corresponding power.
04.21
Speed loop 1 Proportional gain
1
~
100
30
04.22
Speed loop 1 Integral time
0.01
~
10.00S
0.50
04.23
Low frequency switching point
0.0
~
10.0Hz
5.0
04.24
Speed loop 2 Proportional gain
1
~
100
20
04.25
Speed loop 2 Integral time
0.01
~
10.00S
1.00
04.26
High frequency switching point
【
04.23
】~
320.0Hz
10.0
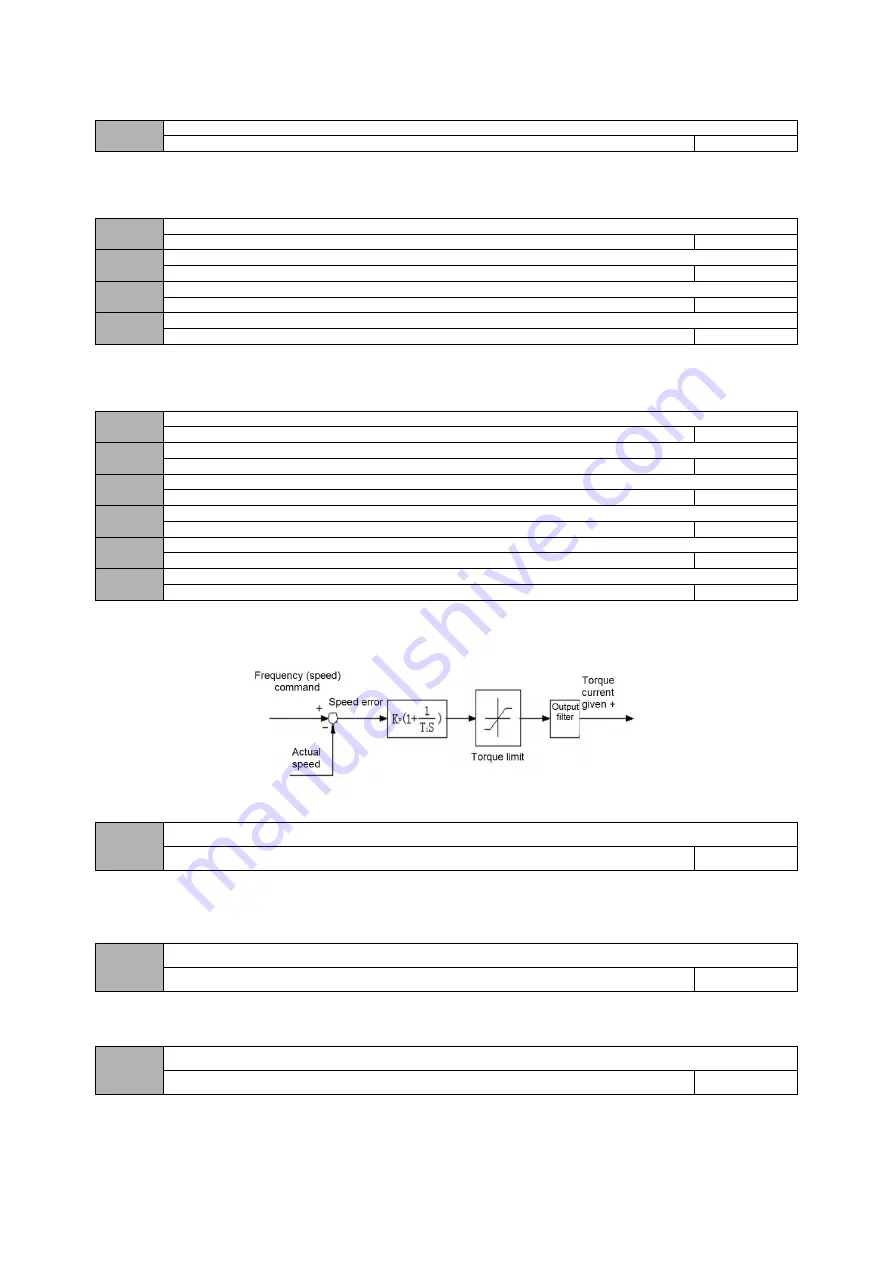
In vector control mode, the speed response characteristics of vector control are changed by setting the proportional gain p and integration time i of the speed
regulator.
The composition of the speed regulator (ASR) is shown in Figure F4-1. In the figure, KP is the proportional gain P, TI is the integral time I
Fig. 04 -1 Simplified diagram of speed regulator
04.27
Vector Slip compensation
50%
~
200%
100
In vector control mode, this parameter is used to adjust the speed stability accuracy of the motor. When the motor is overloaded and the speed is low, increase this
parameter, otherwise decrease this parameter.
04.28
Speed loop filter time constant
0.000
~
1.000S
0.010
Set the speed loop filtering time
04.30
Speed loop torque limit
0.0%
~
200.0%
150%
The set value is a percentage of the rated current of the motor







































































