




























18
Festo — CMMT-ST-C8-1C-...-S0 — 2021-04b
Installation
Information on using EC and stepper motors
When using stepper motors with a safety classification of SIL 3, cat. 3, Pl e and EC motors with a safety
classification of SIL 2, cat. 3, Pl d, it is not mandatory to have a safety relay unit or to evaluate the
feedback signal STA. The following components can be connected to the control inputs #STO-A and
#STO-B to request the safety sub-function STO:
–
Safe semiconductor outputs (electronic safety relay units, active safety sensors, e.g. light curtains
with OSSD signals; OSSD = "Output Signal Switching Device")
–
Switch contacts (safety relay units with relay outputs, passive safety sensors, e.g. forced position
switches)
When using EC motors that require a safety classification of SIL 3, cat. 3, Pl e, it is necessary to have
a safety relay unit and to evaluate the feedback signal STA via the diagnostic contact STA. It is not
permitted to connect safe sensors directly.
5.3
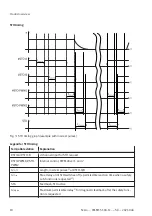
SS1-t installation
Inputs and outputs for the safety sub-function SS1-t
The safety sub-function SS1-t is wired like the safety sub-function STO but is supplemented by
an emergency stop request (either directly by wiring CTRL-EN or indirectly via another functional
controller) so that the braking ramp can be activated by the safety relay unit.
5.4
Installation for operation without safety function
For operation without the safety subfunction, wire inputs X1A.2 to X1A.5 as follows:
[X1A]
Pin
Type
Identifier
Function
X1A.
2
Digital
input
#STO-A
Supplies each one with 24 V
X1A.
3
#STO-B
X1A.
4
Contact
STA-C1
Do not connect
X1A.
5
STA-C2
Tab. 6: Circuitry of inputs and outputs without safety sub-function
5.5
Connection Examples, Cross-wiring
The following rules apply when cross-wiring several servo drives:
–
Wire inputs #STO-A and #STO-B in parallel in each case.
–
Wire diagnostic contacts STA-C1/C2 in series in each case.
–
Wire the diagnostic contacts of a maximum of 10 servo drives in series.
The maximum cable length applies to the entire line, from the safety relay unit to the final device.
Connection Example for Cross-wiring Several Devices without Checking the Diagnostic Contact
The first diagnostic contact of the CMMT-ST must be supplied with 24 V. The diagnostic contacts of the
sequential devices must then be wired in series. Connect the last diagnostic contact for evaluating the
diagnostic information to the safe controller.







































































