





























SuperSigma2 AM PMS
–
V1.5.6 17-1-2020
Page 49 (97)
©2019 DMC GmbH Herten Germany
M3-1T
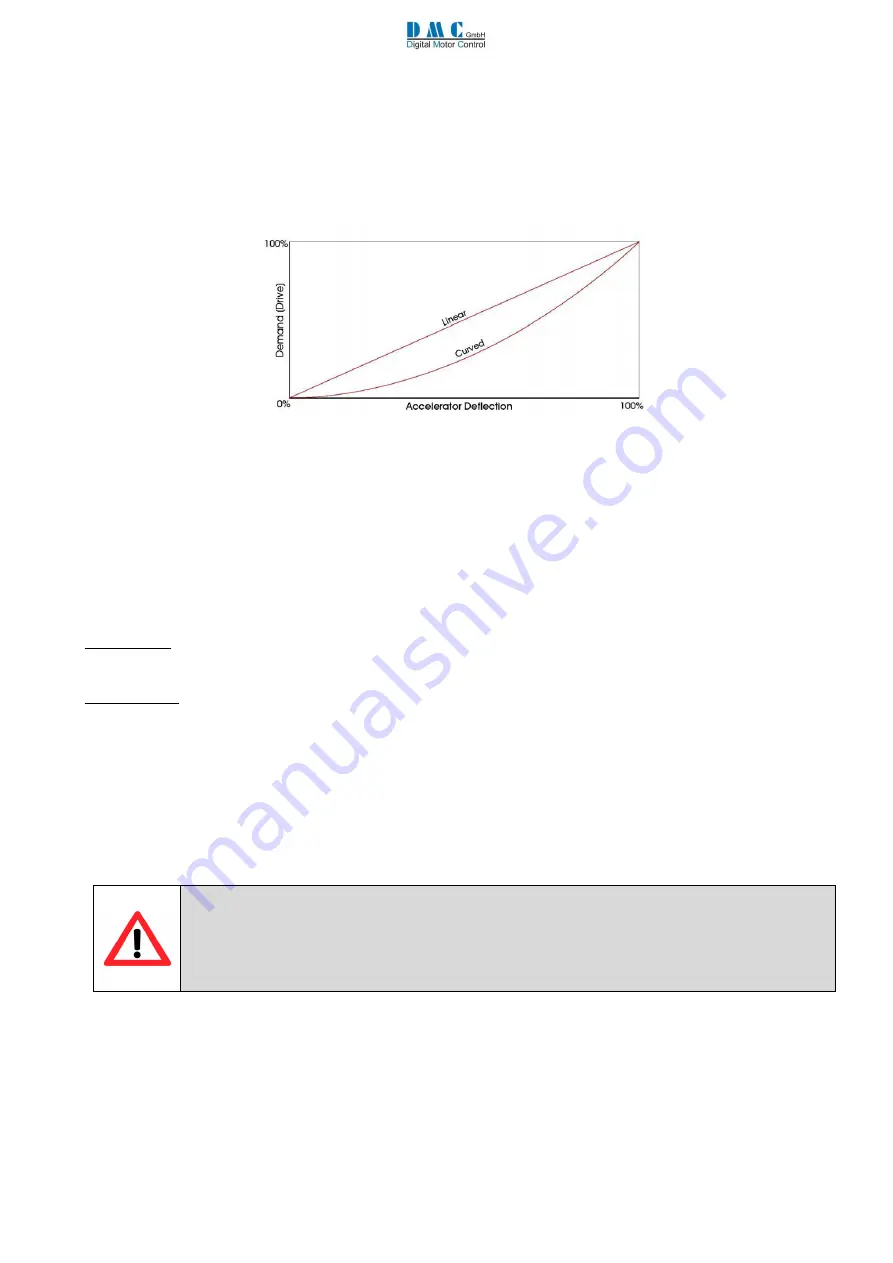
Accel. Characteristic
“
Lin/Curv
”
This parameter defines the accelerator pedal characteristic: Linear or Curved.
•
If set to
0
, the controller will apply a
linear
accelerator input.
•
If set to
1
, the controller will apply a
curved
accelerator input.
The definition of each type is detailed below:
Linear:
For input values of 0%, 50% and 100%, the output will be 0%, 50% and 100%.
Curved:
For input values of 0%, 50% and 100%, the output will be 0%, 25% and 100%.
M3-2T
Control
Mode “Spd/Torq”
This sets whether the controller has to provide speed type control or torque type control:
•
If set to
0
, the controller will apply speed control.
•
If set to
1
, the controller will apply torque control.
•
If set to
2
, the controller will apply torque control with speed control at end of braking.
•
If set to
3
, the controller will apply torque control with speed control at end of braking and the end of footbrake
operation
The definition of each type is detailed below:
Speed control
means that the Accelerator input is used as a speed demand between zero and the programmed maximum
speed for the direction of drive. Speed control results in a constant drive speed for a given demand (Accelerator
deflection), regardless of load.
Torque control
means that the Accelerator input is used to set a torque demand between zero and the programmed
maximum torque. Torque control has the feel of a car: as the load increases, the vehicle will slow and more demand
(Accelerator deflection) must be applied to keep speed constant.
The programmable options are 0 and 3:
Please refer to parameters
from “
Speed threshold to enter end of braking mode ”SpdThEbM”” to “
Restraint hill hold torque threshold ”HHTrqTH”” and End Of Breaking function description in Adjustment menu for
detailed description about setting 2 and 3.
This parameter requires a key cycle off-on to be effective.
VERY IMPORTANT:
•
If a torque mode (1 or 2) is selected the vehicle must have mechanical brake!
•
If speed mode (0) is selected vehicle must have at least electromagnet brake!
•
If a torque mode (3) is selected the vehicle must have at least electromagnet brake!







































































