





























VLT
®
4000 VT
Programming
■
Application functions 400-427
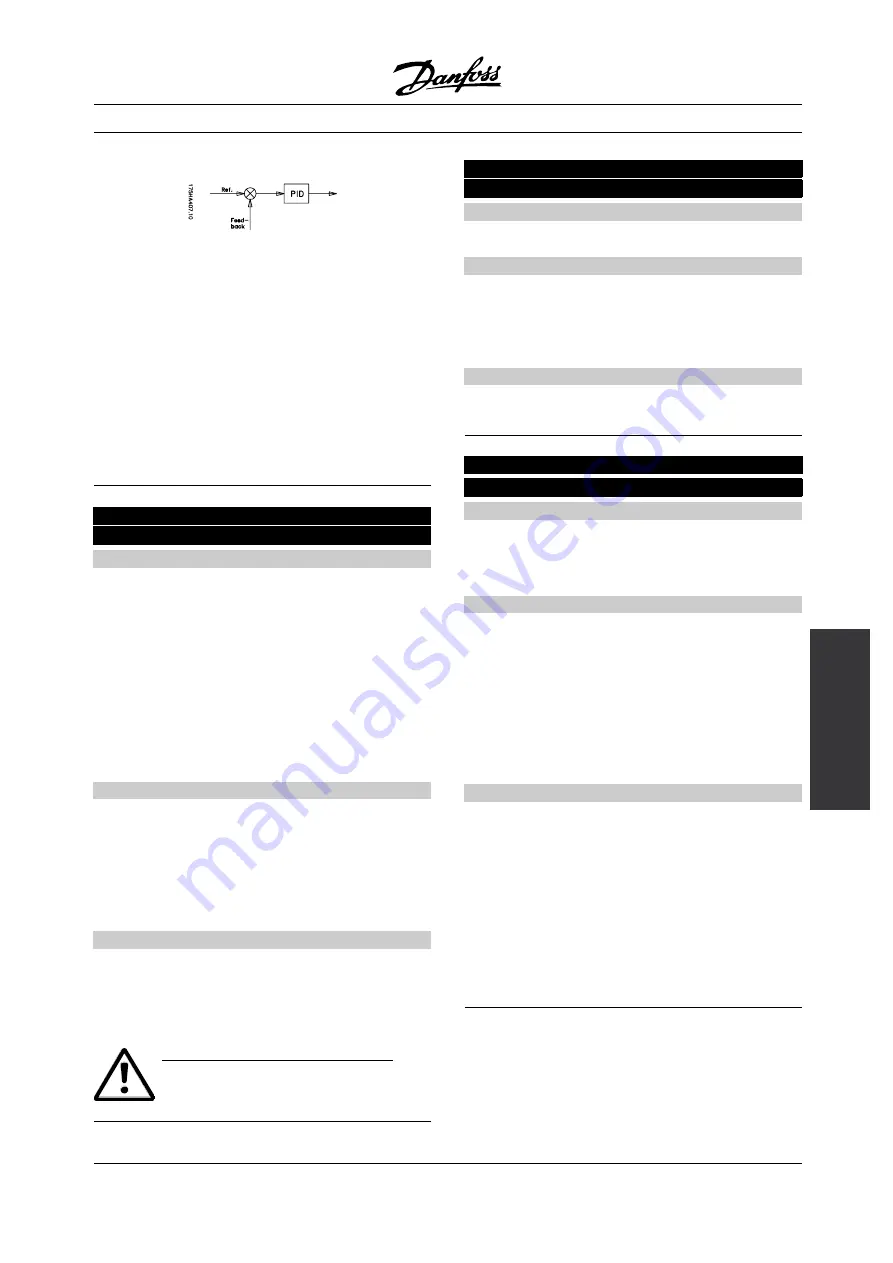
Includes this parameter group, the special functions of
the VLT AFD PID regulation, setting of the feedback
range and the Setup of the Sleep mode function.
Additionally, this parameter group includes:
-
Reset function.
-
Flying start.
-
Option of interference reduction method.
-
Setup of any function upon loss of load, e.g.
because of a damaged V-belt.
-
Setting of switching frequency.
-
Selection of process units.
400 Reset function
(RESET FUNCTION)
Value:
✭
Manual reset (MANUAL RESET)
[0]
Automatic reset x 1 (AUTOMATIC X 1)
[1]
Automatic reset x 2 (AUTOMATIC X 2)
[2]
Automatic reset x 3 (AUTOMATIC X 3)
[3]
Automatic reset x 4 (AUTOMATIC X 4)
[4]
Automatic reset x 5 (AUTOMATIC X 5)
[5]
Automatic reset x 10 (AUTOMATIC X 10)
[6]
Automatic reset x 15 (AUTOMATIC X 15)
[7]
Automatic reset x 20 (AUTOMATIC X 20)
[8]
Infinite automatic reset (INFINITE AUTOMATIC)
[9]
Function:
This parameter allows a choice of whether to reset and
restart manually after a trip, or whether the VLT AFD
is to be reset and restarted automatically. In addition,
there is a choice of the number of times the unit is to
attempt a restart. The time between each reset attempt
is set in parameter 401
Automatic restart time
.
Description of choice:
If
Manual rese
t [0] is selected, resetting must be
effected via the "Reset" key or via a digital input. If
the VLT AFD is to carry out an automatic reset and
restart after a trip, select data value [1]-[9].
The motor may start without warning.
401 Automatic restart time
(AUTORESTART TIME)
Value:
0 - 1800 sec.
✭
10 sec.
Function:
This parameter allows setting of the time from
tripping until the automatic reset function begins. It
is assumed that automatic reset has been selected
in parameter 400
Reset
function.
Description of choice:
Set the desired time.
402 Flying start
(FLYING START)
Value:
✭
Disable (DISABLE)
[0]
Enable (ENABLE)
[1]
DC brake and start (DC BRAKE AND START)
[3]
Function:
This function makes it possible for the AFD to "catch" a
spinning motor, which - e.g. because of a line failure
- is no longer controlled by the AFD. This function is
activated whenever a start command is active.
For the VLT AFD to be able to "catch" the spinning
motor, the motor speed must be lower than the
frequency that corresponds to the frequency in
parameter 202
Output frequency high limit, f
MAX
.
Description of choice:
Select
Disable
[0] if this function is not required.
Select
Enable
[1] if the AFD is to be able to "catch"
and control a spinning motor. Select
DC brake and
start
[2] if the VLT AFD is to brake the motor with DC
braking, and then restart the motor. It is assumed
that parameters 114-116
DC braking
are enabled. In
the case of a substantial "windmilling" effect (spinning
motor), the AFD will not "catch" a spinning motor
unless
DC brake and start
has been selected.
MG.40.A7.22 - VLT is a registered Danfoss trademark
95







































































