





























EM11 User’s Manual
5. Description of Function Codes
89
frequency is set in bb-36.
Code
Parameter Name
Setting Range
Default
bb-36
Frequency selection
for continuing to run
of fault
0: Current running frequency
1: Set frequency
2: Frequency upper limit
3: Frequency lower limit
4: Backup frequency of abnormality (bb-37)
0
bb-37
Backup frequency of
abnormality
0.0%~100.0% (maximum frequency)
1.0%
If a fault occurs during the running of the frequency inverter and the handling of fault is set to "continue to
run", the frequency inverter displays A** and continues to run at the frequency set in bb-36.
The setting of bb-37 is a percentage relative to the maximum frequency.
5.13 Group bC: Fault detection Parameters
Code
Parameter Name
Setting Range
bC-00 1st
fault
type
0~99
bC-01 2nd
fault
type
0~99
bC-02 3rd fault type (latest)
0~99
It is used to record the types of the most recent three faults of the frequency inverter. 0 indicates no fault. For
possible causes and solution of each fault, refer to Chapter 8.
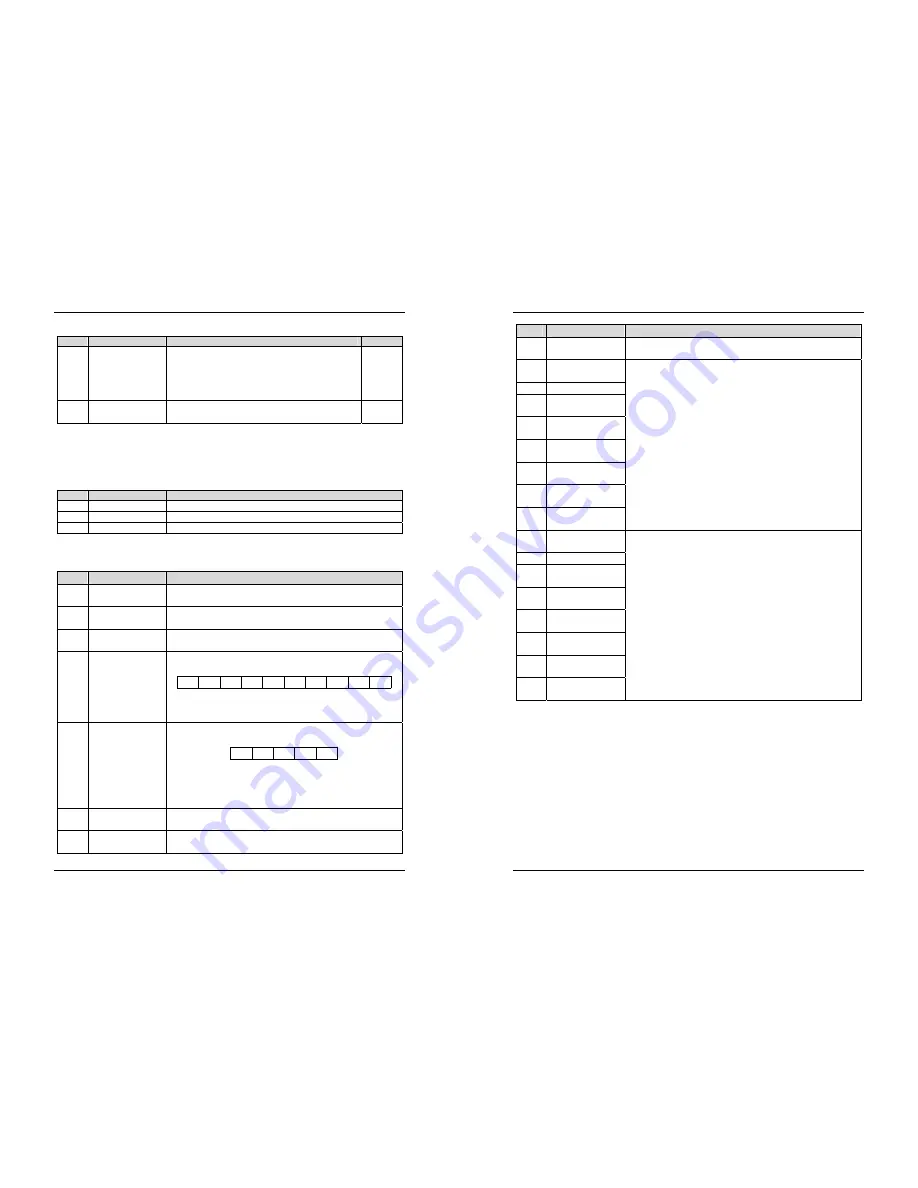
Code
Parameter Name
Description
bC-03
Frequency of latest
fault
It displays the frequency when the latest fault occurs.
bC-04
Current of latest
fault
It displays the current when the latest fault occurs.
bC-05
DC Bus voltage of
latest fault
It displays the DC bus voltage when the latest fault occurs.
bC-06
Input terminals
status of latest fault
It displays the status of all DI terminals when the latest fault occurs.
The sequence is as follows:
BIT9 BIT8 BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
DI0 DI9 DI8 DI7 DI6 DI5 DI4 DI3 DI2 DI1
If a DI is ON, the setting is 1. If the DI is OFF, the setting is 0. The
value is the equivalent decimal number converted from the DI status.
bC-07
Output terminal
status of latest fault
It displays the status of all output terminals when the latest fault
occurs. The sequence is as follows:
BIT4 BIT3 BIT2 BIT1 BIT0
DO2 DO1 REL2 REL1 FMP
If an output terminal is ON, the setting is 1. If the output terminal is
OFF, the setting is 0. The value is the equivalent decimal number
converted from the DI statuses.
bC-08
Frequency inverter
status of latest fault
Reserved
bC-09
Power-on time of
latest fault
It displays the present power-on time when the latest fault occurs.
5. Description of Function Codes
EM11 User’s Manual
90
Code
Parameter Name
Description
bC-10
Running time of
latest fault
It displays the present running time when the latest fault occurs.
bC-11
Frequency of 2nd
fault
Same as bC-03~bC-10.
bC-12
Current of 2nd fault
bC-13
DC Bus voltage of
2nd fault
bC-14
Input terminal status
of 2nd fault
bC-15
Output terminal
status of 2nd fault
bC-16
Frequency inverter
status of 2nd fault
bC-17
Power-on time of
2nd fault
bC-18
Running time of 2nd
fault
bC-19
Frequency of 1st
fault
Same as bC-03~bC-10.
bC-20
Current of 1st fault
bC-21
DC Bus voltage of
1st fault
bC-22
Input terminal status
of 1st fault
bC-23
Output terminal
status of 1st fault
bC-24
Frequency inverter
status of 1st fault
bC-25
Power-on time of 1st
fault
bC-26
Running time of 1st
fault
5.14 Group C0: Process Control PID Function
PID control is a general process control method. By performing proportional, integral and differential
operations on the difference between the feedback signal and the target signal, it adjusts the output
frequency and constitutes a feedback system to stabilize the controlled counter around the target value.
It is applied to process control such as flow control, pressure control and temperature control. The
following figure shows the principle block diagram of PID control.







































































