





























EM11 User’s Manual
5. Description of Function Codes
51
Code
Parameter Name
Setting Range
Default
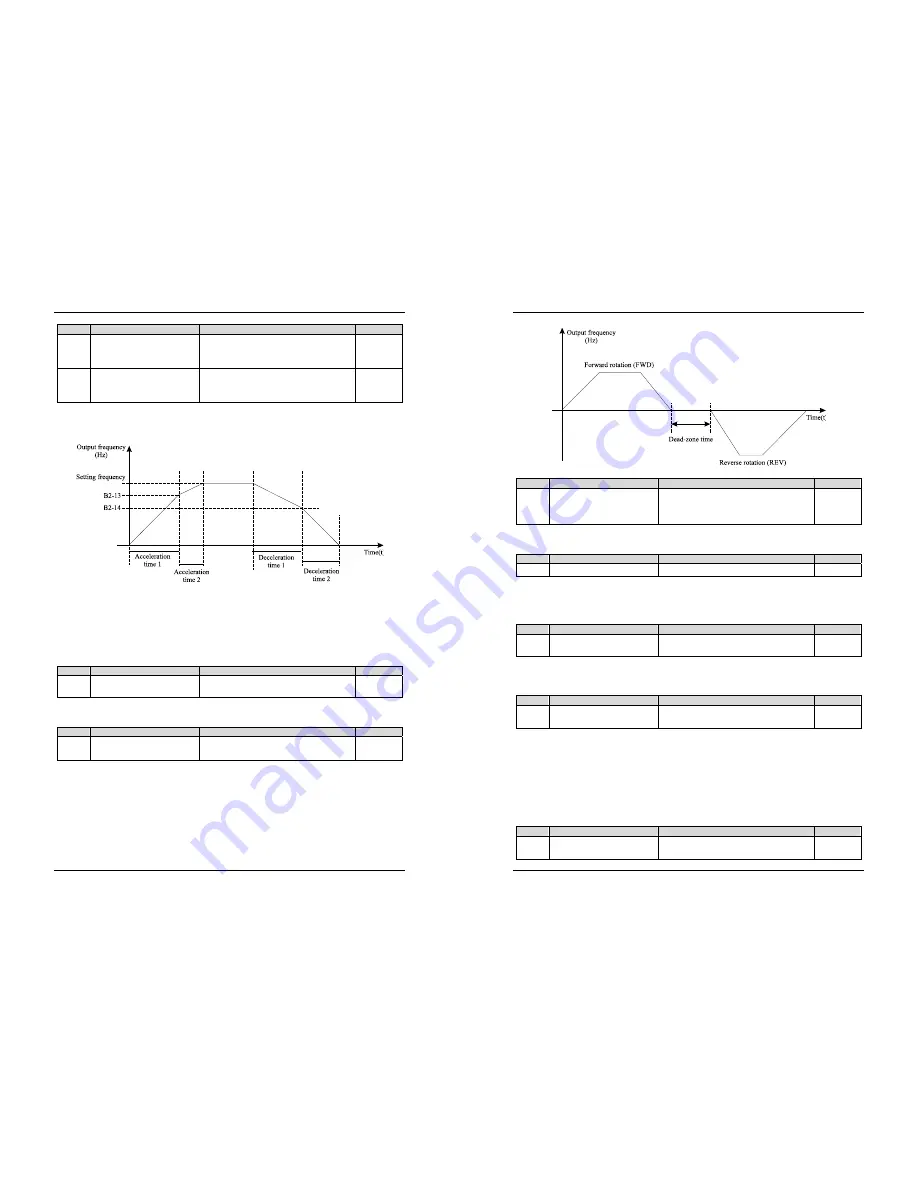
b2-13
Frequency switchover point
between acceleration time 1
and acceleration time 2
0.00 Hz ~ maximum frequency
0.00 Hz
b2-14
Frequency switchover point
between deceleration time 1
and deceleration time 2
0.00 ~ maximum frequency
0.00 Hz
This function is valid when motor 1 is selected and acceleration/deceleration time switchover is not
performed by means of DI terminal. It is used to select different groups of acceleration/ deceleration time
based on the running frequency range rather than DI terminal during the running process of the frequency
inverter.
Diagram 5-8 Acceleration/deceleration time switchover
During acceleration, if the running frequency is smaller than the value of b2-13, acceleration time 1 is
selected. If the running frequency is larger than the value of b2-13, acceleration time 2 is selected.
During deceleration, if the running frequency is larger than the value of b2-14, deceleration time 1 is
selected. If the running frequency is smaller than the value of b2-14, deceleration time 2 is selected.
Code
Parameter Name
Setting Range
Default
b2-15 Reverse
running
0: Enabled
1: Disabled
0
It is used to set whether the frequency inverter allows reverse rotation. In the applications where reverse
rotation is prohibited, set this parameter to 1.
Code
Parameter Name
Setting Range
Default
b2-16
Forward/Reverse rotation
dead-zone time
0.0~3000.0s 0.0s
It is used to set the time when the output is 0 Hz at transition of the frequency inverter forward rotation and
reverse rotation, as shown in the following figure.
5. Description of Function Codes
EM11 User’s Manual
52
Diagram 5-9 Forward/Reverse rotation dead-zone time
Code
Parameter Name
Setting Range
Default
b2-17
Running mode when set
frequency lower than
frequency lower limit
0: Run at frequency lower limit
1: Stop
2: Run at zero speed
0
It is used to set the frequency inverter running mode when the set frequency is lower than the frequency
lower limit. The EM11 provides three running modes to satisfy requirements of various applications.
Code
Parameter Name
Setting Range
Default
b2-18
Droop control
0.00Hz~10.00 Hz
0.00 Hz
This function is used for balancing the workload allocation when multiple motors are used to drive the same
load. The output frequency of the frequency inverters decreases as the load increases. You can reduce the
workload of the motor under load by decreasing the output frequency for this motor, implementing workload
balancing among multiple motors.
Code
Parameter Name
Setting Range
Default
b2-19
Terminal JOG priority
0: Disabled
1: Enabled
0
It is used to set whether terminal JOG is priority.
If terminal JOG is priority, the frequency inverter switches to terminal JOG running state when there is a
terminal JOG command during the running process of the frequency inverter.
Code
Parameter Name
Setting Range
Default
b2-20
Setting power-on time reach
threshold
0~65000 h
0 h
If the accumulative power-on time (b9-08) reaches the value set in this parameter, the corresponding DO
terminal output ON signal.
For example, combining virtual DI/DO functions, to implement the function that the frequency inverter
reports an alarm when the actual accumulative power-on time reaches the threshold of 100 hours, perform
the setting as follows:
1.
Set virtual DI1 to user-defined fault 1: b7-00 = 40.
2.
Set that the valid state of virtual DI1 is from virtual DO1: b7-05 = 0000.
3.
Set virtual DO1 to power-on time reached: b7-11= 25.
4.
Set the accumulative power-on time reach threshold to 100 h: b2-20 = 100 h.
Then, the frequency inverter alarm output Err27 when the accumulative power-on time reaches 100 hours.
Code
Parameter Name
Setting Range
Default
b2-21
Setting running time reach
threshold
0~65000 h
0 h







































































