


















Bosch Rexroth Corp.
, USL00010, 01.2015
26 Optimize Control Loops
26.1 Optimize control loops for a specific application
Basic motor and CKL system control loop parameters are described in this document for
initial startup.
When the application specifications (load, motion profile, etc) are known, further control loop
tuning might be required. Two methods are possible with IndraWorks, manual and automatic
methods. A suggestion would be to perform automatic for initial tuning and manual for fine-
tuning. Be advised, due to the cascading structure of the control loops, for manual tuning
start with the inner most loop and work your way outward, i.e. current loop → velocity loop
→ position loop. The current loop is already optimized for the linear motor; therefore, current
loop tuning is typically not required. However, adjusting the PWM Switching Frequency
(parameter P-0-0001 in Motor Control → Current Control screen) may be desirable for some
applications, e.g. lower noise generation. If making this or any other motor current control
adjustments, please consult IndraDrive Firmware help.
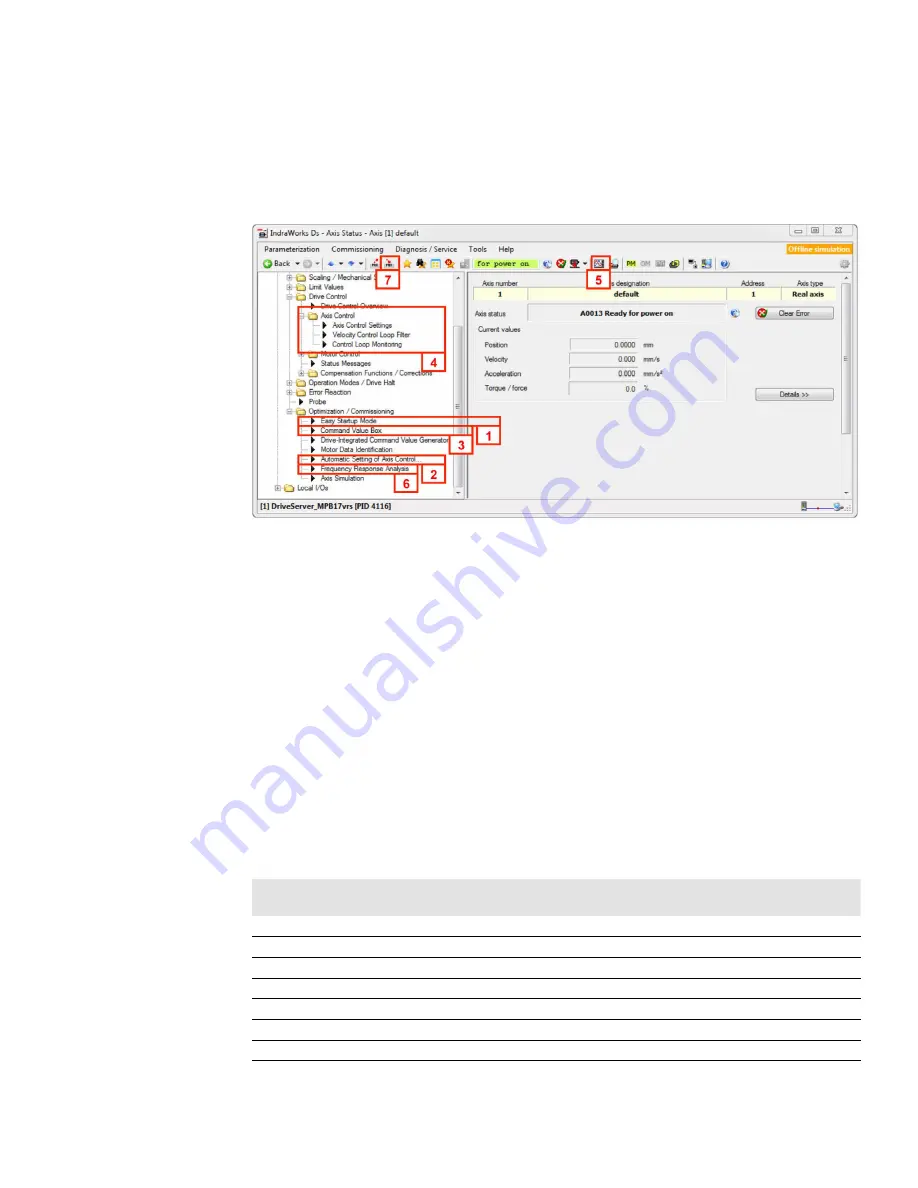
24.1.1 Steps for optimizing CKL system velocity/position control loops
(repeat as necessary):
No.
Function
Purpose
Automatic
Method
Manual
Method
1
Easy Startup Mode
Enable power
YES
YES
2
Automatic Setting of Axis Control
Automatic tuning
YES
N/A
3
Command Value Box
Start velocity/position move
YES
YES
4
Axis Control functions
Adjust control loop parameters
N/A
YES
5
IndraWorks Oscilloscope
Analyze transient performance
YES
YES
6
Frequency Response Analysis
Analyze control loop stability
YES
YES
7
Save Parameters
Save optimized parameters
YES
YES
For detailed functional descriptions and instructions, please see IndraDrive Firmware help.
40
Optimize Control Loops







































































