www.balluff.com
53
english
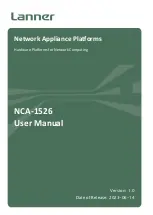
5.5.4 ISDU
Minimum
,
Maximum
,
Average
and
Moving
Average outputs
are output in FLOAT32 format.
Before they are processed further and converted
from FLOAT32 to INT32 or UINT32, the output
signal must be checked to determine whether it
is larger than int32_Max or uint32_Max. If it is
larger, data type UINT64 or INT64 should be
used.
Name
Index
Subindex
Access
Length
Data Type
Data
Storage
Default
Statistics
Data
Configuration
0x0426
(1062)
0
R/W
8 bytes
Yes
–
Input Signal
1
R/W
2 bytes
ENUM
No
–
Time Period
Unit
2
R/W
1 byte
ENUM
No
Seconds
Time Period
Value
3
R/W
2 bytes
UINT16
No
1
Moving
Average
Window Unit
4
R/W
1 byte
ENUM
No
Measurement
values
Moving
Average
Window
Value
5
R/W
2 bytes
UINT16
No
100
Statistics
Data Output
0x0427
(1063)
0
R
21 bytes
No
–
Minimum
1
R
4 bytes
Float32
No
0
Maximum
2
R
4 bytes
Float32
No
0
Average
3
R
4 bytes
Float32
No
0
Moving
Average
4
R
4 bytes
Float32
No
0
Number of
samples
5
R
4 bytes
UINT32
No
0
Status
6
R
1 byte
UINT8
No
0
Tab. 5-24: Basic statistics – ISDU
Statistics Data Configuration: Input Signal
All data types of process data objects can be used for
input configuration, with the exception of Boolean. The
respective Object IDs can be found in the respective
section on the function.
5
Secondary Device Functions (continued)
BOS R254K-UUI-LH10-S4
Photoelectric Sensors
Содержание BOS R254K-UUI-LH10-S4
Страница 1: ...deutsch IO Link Konfiguration english IO Link Configuration BOS R254K UUI LH10 S4...
Страница 2: ...www balluff com...
Страница 3: ...BOS R254K UUI LH10 S4 IO Link Konfiguration deutsch...
Страница 4: ...www balluff com...
Страница 99: ...BOS R254K UUI LH10 S4 IO Link Configuration english...
Страница 100: ...www balluff com...
Страница 195: ......