


























AV6A 12
E
thernet Modbus TCP “M”
Modbus TCP Ethernet is typically a master-slave network-the
master/scanner device gathers data from each (slave) device on the
bus. Avtron encoders are Modbus TCP slave devices.
Modbus TCP Ethernet may be wired in several different
configurations, but the best known is a “star” configuration where
each device has a “home-run” network cable that connects to a
central switch or hub.
Unlike other Avtron Ethernet encoders, Modbus TCP encoders do not
support a daisy-chain configuration. Each device must be direclty
connected to the master/scanner device or to a switch or hub.
Preferred cable: Nidec Avtron recommends structured Ethernet
wiring systems, available from a broad range of vendors as well as
Avtron.
For more details on Modbus TCP, consult the Modbus Organization:
www.modbus.org
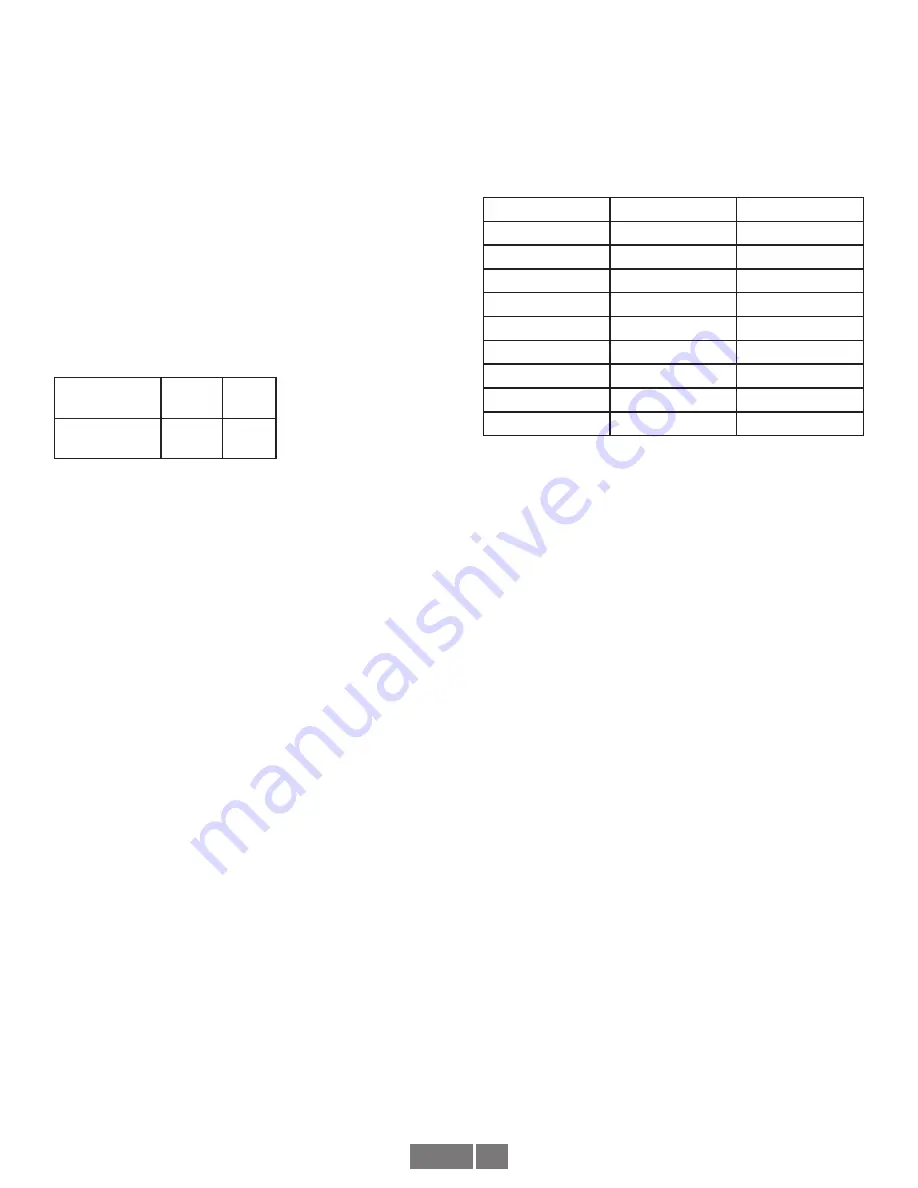
Number of
Nodes
1
Units
Max. Overall
Cable Length*
330
[100]
ft
[m]
*Using Ethernet standard cable, CAT6 or CAT5e required
Setting Station/Node, Baud Rate
The default hardware address is 10.10.10.10.
NOTE: Rotating switches have NO EFFECT on
MODBUS/TCP address.
Unlike other Avtron encoders, you
cannot change this hardware address using the switches inside the
cap.
Instead, to assign any other address, you must use software.
To set the node number via software, remove the connection cap
from the back of the encoder. Flip dip switch 2 to “Off”, reassemble
the encoder.
Setting IP Address via utility software:
Begin with a factory-default encoder at 10.10.10.10 address with
dip switch 2 set to “on” in the connection cap.
Make a physical Ethernet connection between a PC and the encoder.
Run the utility Mon10.bat (available as zipped folder from www.
avtronencoders.com). This will establish a connection to the
encoder and allow assignment of the IP address through the hymon.
exe software, also included in the zipped folder.
Type the command (all lower case)
set ip xxx.xxx.xxx.xxx (where xxx is the desired IP address)
The encoder will respond “Flash memory update successful”
After assigning the IP address, remove power, then remove the
connection cap. Set dip switch 2 to “off”, which cycle power to
the encoder. The encoder will now respond to the new IP address.
(Verify using ping xxx.xxx.xxx.xxx where xxx represents the new ip
address from PC)
Ethernet baud rate is auto-detected by the encoder, no settings are
required. 100mBit and 10mBit are supported, Gigabit Ethernet is
not supported at the encoder level but may be utilized at the switch
backbone level.
Measuring Position, Speed, and Acceleration
To read position into your device (acceleration and speed
measurement is not supported.):
For multiturn & single turn encoders: position data provided as
4 bytes, 32 bits: Format is little-endian (lowest bit = right-most
bit). Single-turn data/data within 1 turn is provided in the least-
significant bits. Multiturn data is provided in adjacent 32-bit words.
Example: 12 turns x 13 bits/turn encoder, lowest 13 bits = position
within one turn, next 19 bits are unused. Next 12 bits represent
turns position data, next 24 bits are unused.
Note velocity output is not accurate during command execution such
as setting (zero) position.
Start Address 0000
Register
Data Type
Position
0
Position
Bit 17-32
1
Position
Bit 1-16
2
Velocity
Bit 17-32
3
Velocity
Bit 1-16
4-7
Time Stamp
14
Preset
Bit 17-32
15
Preset
Bit 1-16
16
Offset
Bit 17-32
17
Offset
Bit 1-16
The position data is provided at parameter 0x6004.
Setting (Zero) Position for Multiturn Encoders and Single turn
Encoders:
Start Address 0000, Register 14-15 Preset object which will load
a preset value into the encoder. However, if the machine is not at
the home/preset position at set position command, the system will
nonetheless load the Preset Value into the encoder. This can cause
a position error.
Setting Direction of Rotation for Count Up/Down:
Start Address 0000, Register 18, least significant bit (0) can be set to
change operation:
bit 0 = 0, Counterclockwise rotation = count up
bit 0 = 1, Clockwise rotation = count up
(rotation as viewed from the back of the encoder)
Scaling Counts:
To use scaling, set bit 2 in object 0x6000 = 1, default value = 0
0x6001 supports scaling of user units per revolution,
default value 0x2000
0x6002 enables setting of the total measuring range in user units
default value 0x1000
Multiplexed Mode
Multiplexed mode is supported by Avtron encoders. Multiplexing
slows the data feed from each encoder to enable other data to pass
more quickly to the master/scanner module.
For maximum encoder updates per second in mission critical
applications, turn Multiplexed mode off using the master/scanner
configuration software.
Other Parameters
Contact Nidec Avtron for additional parameters, diagnostic registers,
cam and programmable limit switch functionality and other
advanced features.
MODBUS TCP TROUBLESHOOTING
Viewing on oscilliscope: for Modbus TCP/Ethernet, the transmit and
receive signal pairs should change state rapidly as the controller
transmits messages to the encoder and the encoder replies.
Transmission rates vary, but these messages can be extremely short
and typically require scope triggering to spot them.
A simple one-to-one connection can be made to an ordinary PC. Set







































































